Other Parts Discussed in Thread: LAUNCHXL-F28069M, MOTORWARE, , LAUNCHXL-F280049C, BOOSTXL-DRV8320RS, C2000WARE, BOOSTXL-DRV8323RH
I have two boards: Boostxl-DRV8232Rx && Launchxl-F28069M. I try use labs instaSPIN-FOC and try use GUI to control BLDC.
But the motor can't work. I edit parameters in use user and user_j1. I'm not sure which setting is wrong.
Question
1. My HALL sensor is broken, is it not working because of it?
2. Do I miss the motor setting?
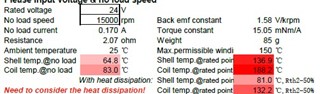
my motor is a BLDC and it has 1 pairs of poles. and inductance 0.192mH