


Other Parts Discussed in Thread: DRV8313,
Have you ever designed, developed, used or just played with any sensorless brushless-DC (BLDC) motor control system? If so, you may already know the importance of continuously and accurately knowing motor winding currents. A motor spin operation can be categorized into different states starting from initial position detect or align, then open loop state, followed by actual closed loop state and then the motor stop state. A controller keeps looking at current and voltage feedback from the motor during all these states to determine next phase signal to be applied to the motor. The controller also uses current feedback to detect fault conditions and react accordingly to make the motor system reliable and robust. Let’s just say that current sensing is heart and soul of any sensorless motor control operation.
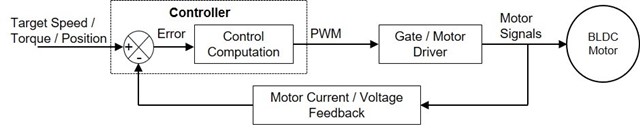
Figure 1: Typical control loop for a sensorless BLDC motor system
Current sensing can be done by two main architectures:
- A traditional approach – External resistor current sensing: This type of current sense is achieved by either adding a resistor in series with motor phases (also known as in-line current sensing) or a resistor below the low side FET source (also known as low side shunt based current sensing). In both cases, the voltage drop across the resistor is measured using voltage amplifier and fed back to the controller using an ADC (for motor commutation) or a comparator (for monitoring). In a 3-phase BLDC motor system, you will typically need three such resistors to measure current in each winding. You may measure two winding current using two sense resistors and then calculate the current in the third winding inside the controller. You can reduce the resistors by combining all three sense resistors and just measuring one summed current. This will limit the kind of control technique you can use in your system. These resistors need to be power resistors, capable of handling the full load motor current. The resistors will also have some significant power dissipation, creating thermal hotspots on the board.
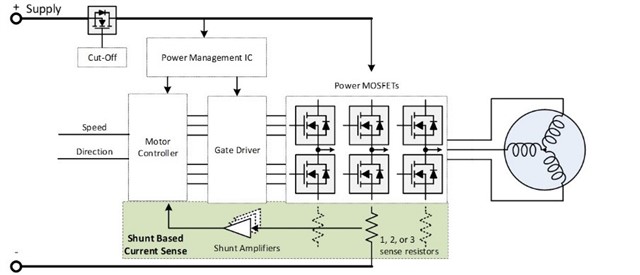
Figure 2: Low Side Shunt Based Current Sense Architecture
In an example of DRV8313 Reference Design, which is built with single shunt resistor to measure summed motor current, the resistor footprint is 3.05mm x 1.55mm. To compare with other components on the board, the footprint of single shunt resistor is 13% of the 3-phase integrated motor driver DRV8313 footprint. If you were to use three resistors to measure all winding currents, then the resistors can occupy as much as 50% of the total driver area on the board!
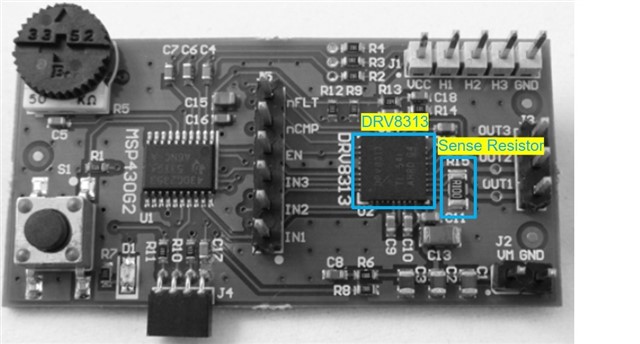
Figure 3: DRV8313 Reference Design Board
- A new way – Integrated current sensing: In devices featuring integrated current sensing, the current is sensed inside the motor (integrated FET) driver. In this architecture, the winding current is sensed via replicating the current from power FET to a smaller FET and passing it through an amplifier before providing feedback to the motor controller. This technique eliminates the need for any current-sense component on the board (and hence saves quite a bit of board space!). Another benefit is to remove one source of thermal dissipation and power loss in the system. Thus, this approach makes the overall system smaller and cooler. You can refer to DRV8316 EVM design as an example and observe that there is no big resistor on the board, making it much smaller as compared to any external current sensing based designs.
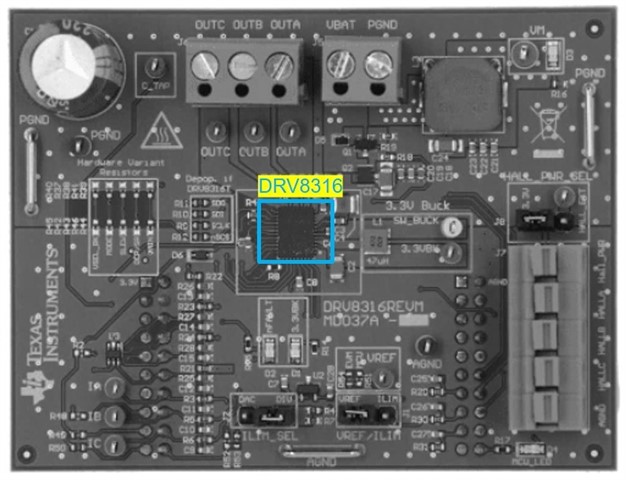
Figure 4: DRV8316 EVM Board
In the next part of this FAQ (LINK), we will look into system parameters like the transfer function and accuracy of current sense with these two architectures. Stay tuned to make sense of current sense in a sensorless BLDC motor systems 
-- Prajkta Vyavahare (PV), Marketing and Applications manager for BLDC Motor Drives
