Other Parts Discussed in Thread: DRV8842-EP, DRV8842, , DRV8872-Q1, DRV8876
Hello,
This is a question regarding current regulation of DRV8842-EP.
We are now testing the current regulation function of DRV8842 on the evaluation board.
The test evaluation is below;
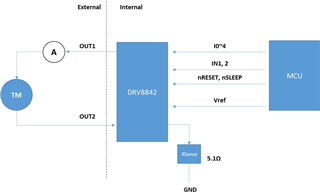
Target : DRV8842EVM
Rsense : 5.1ohm
Vref : 2.5v
Moter(TM) : L=43mH, R=24.9ohm
VM : 24v
We would like to check current regulation with adjustable Ichop.
Ichop and IN2 is constant. Ichop is 100%, IN2 is 0%.
In the pattern 1, IN1 is adjusted between 0% to 100%, and expected current value is 100mA.
Results of each test case is as a following;
Case 1: IN1=100%
Actual current = 138.4mA
Case 2: IN1=75%
Actual current = 162.5mA
Case 3: IN1=50%
Actual current = 99.6mA
Case 4: IN1=25%
Actual current = 99.3mA
Case 5: IN1=15%
Actual current = 99.6mA
Case 6: IN1=5%
Actual current = 31.9mA
Case 7 : IN1=0%
Actual current = 0mA
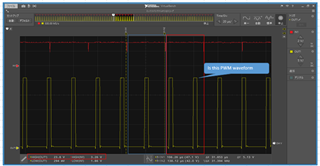
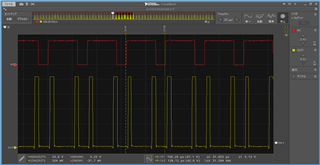
In these results, Case3 to Case7 could have operated current regulation, however Case1 and Case2 could not operate current regulation by Ichop.
Could you please tell me about configuration of correctly operated current regulation?
Thanks,
Sho