- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Hello, we encounter the problem of motor stall when the motor is unloaded during the use of drv889. Please consult you about how to solve it. The specific configuration is as follows:
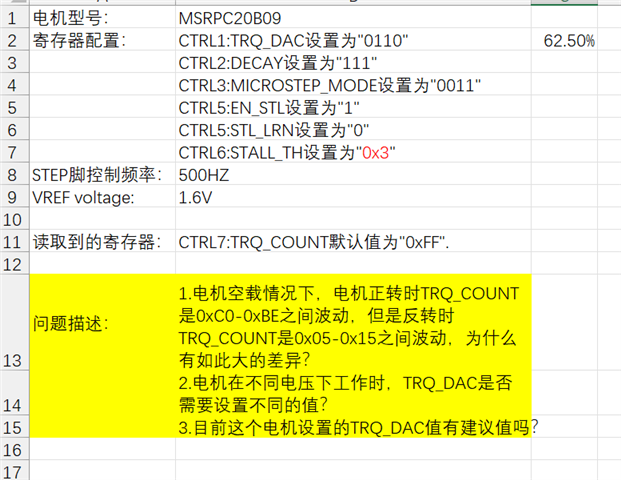
Motor model: MSRPC20B12
Register configuration: CTRL1:TRQ_ DAC is set to "0001"
Ctrl2:decay is set to "111"
CTRL3:MICROSTEP_ Mode is set to "0011"
CTRL5:EN_ STL set to "1"
CTRL5:STL_ LRN is set to "0"
CTRL6:STALL_ Th is not set, and the default value is "0xf"
Step foot control frequency: 500HZ
VREF voltage: 1.6V
Registers read: CTRL7:TRQ_ The default value of count is "0xff", and it is always "0" when the motor is running
Diag status 2: the value read by stall motor with high probability is "1"
Run the motor according to the configuration in the above figure, and read the motor stall when the motor is unloaded. Please help to see what the reason is, thank you!