



Hi Expert,
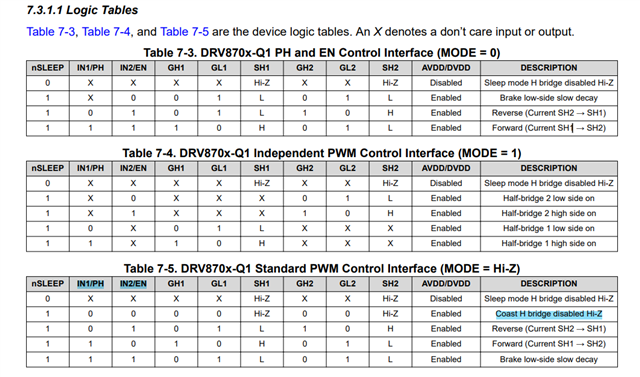
As you can below, when setting MODE= 0, I can use a GPIO on IN1/PH to control direction and use PWM on IN2/EN to control speed. When setting MODE= Hi-Z, I may need to use two PWM signals. Though, I still don't get why we design these two mode because I think they are very similar. Could you please share why we design as this? Thanks.
BR,
Elec Cheng
