Hi Team,
For the MCT8316A circuit board made by myself, the parameters set during debugging are as follows.
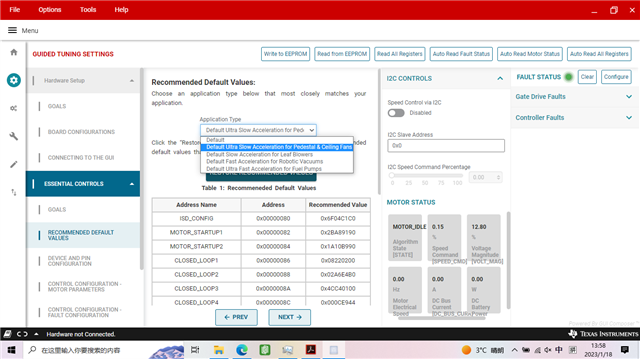
I modified the following parts of the default parameters above.
First, I calculated the Maximum Motor Electrical Speed based on the motor driver's speed.
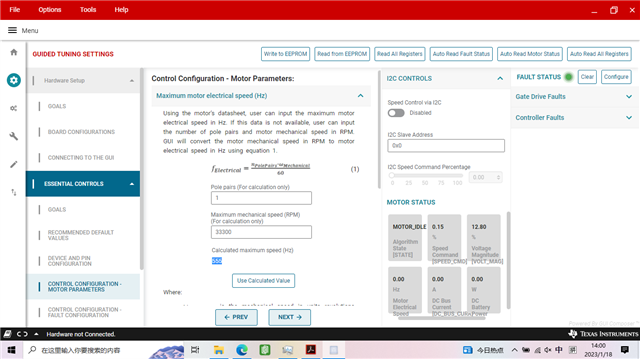
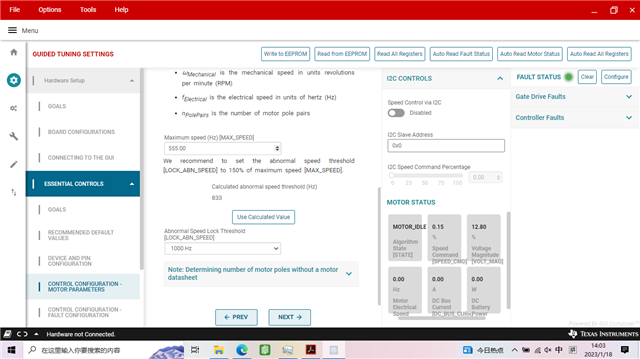
The Maximum Motor Electrical Speed is 555Hz, so the value of MAX_SPEED should be 555 x 16 = 8880 (0x22B0), as shown in the figure below.
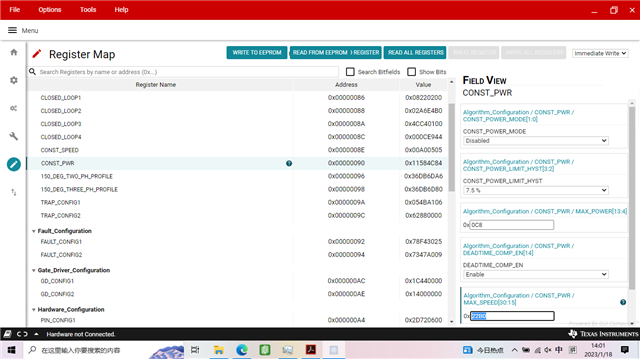
Second, I modified the setting of LOCK_ABN_SPEED according to the value of MAX_SPEED as shown in the figure below.
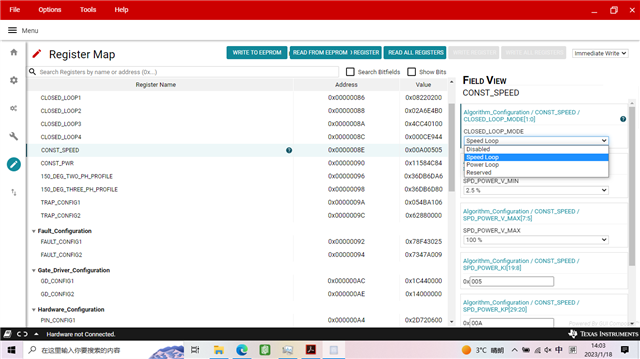
Third, I adjusted CLOSE_LOOP_MODE from disable to Speed Loop as shown in the figure below.
During the test, I found that after the making configuration above, the motor driver could not work, and the power supply current did not fluctuate. The DEVOFF and Brake pins of the chip were processed down to GND, and these two functions were not enabled.
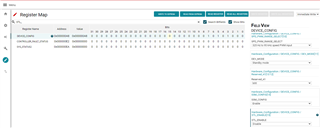
Finally, I found that after setting the registers as follows, the motor driver could work as shown in the figure below.
During the operation of the motor driver,
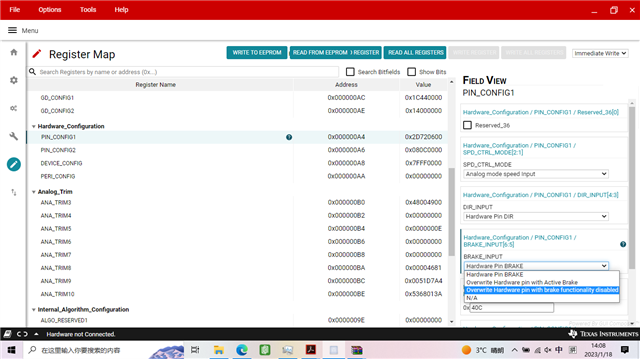
1. When I selected 'Overwrite Hardware pin with Active Brake', the motor driver would stop running.
2. When I selected 'Hardware Pin BRAKE', no matter whether the Brake pin was high- or low-level, the motor driver would stop running. From this phenomenon, the Brake function of the external pin seemed to be useless.
Could you please tell me why the motor driver could run only when 'Overwrite Hardware pin with brake functionality disabled' was selected? How to use the brake function of the external pin?
Kind regards,
Katherine