Hi team
Do you have more detailed information regarding the smart tune ripple control mode of DRV8889-Q1? Customer needs to better understand how our device control the PWM chopping and the ripple to analyze the EMC behavior
For example, in below picture in datasheet, for the on time regulation, point1 seems to be reaching the Itrip, which point 2 seems to be hitting the tblank time. How the device calculate the on-time?
And for the off-time, it seems the device regulate by hitting the Ivalley.
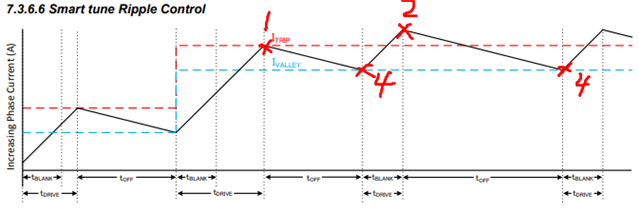
And in below picture, how device regulate the stage2 and stage3?
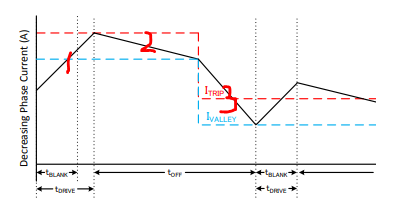
And could you help confirm with us how device adjust the Itrip and Ivalley?
Thank you
Scarlett