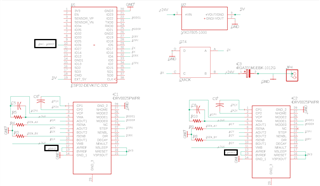
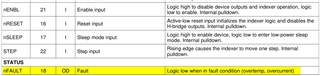
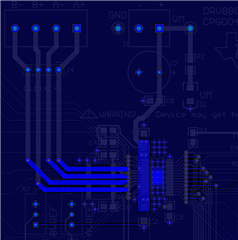
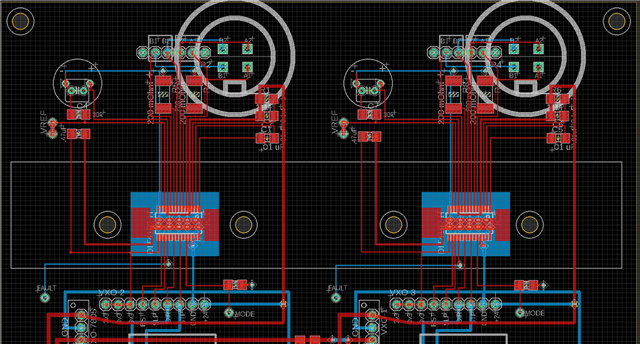
The problem is how one of two motors (one stepper driver on each) eventually stops. The fault pin goes down to zero volts.
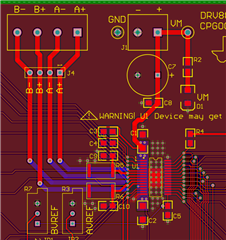
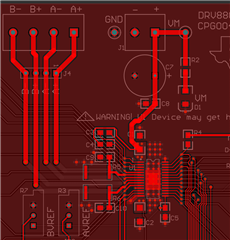
So I am wondering why the fault pin is logic low to begin with. It is on a custom PCB (not a carrier or dev board).
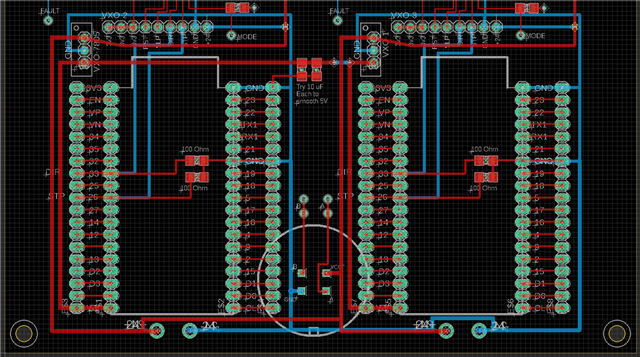
The problem is how one of two motors (one stepper driver on each) eventually stops. The fault pin goes down to zero volts.
So I am wondering why the fault pin is logic low to begin with. It is on a custom PCB (not a carrier or dev board).