Hello,
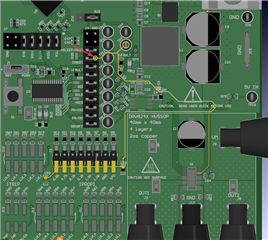
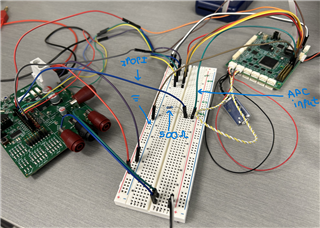
I am using a DRV8244S-Q1LEVM motor driver which is apart of the VQFN-HR package. I am having some trouble with finding the operating current of a motor based on the ADC in value that is passed in to my MR-CANHUBK344 microcontroller board by the IPROPI pin. My current setup is shown below:
I know that VPROP = RPROP * (DriverOperatingCurrent / AIPROP) from conversations on this previous thread:
from my understanding my values are as follows: AIPROP = 4750 A/A, RPROP = 500 Ω
The particular questions I have
1) How do I measure the driver operating current properly (right now I have a multimeter in series with the Out 1 and Out 2 pins and the motor and it is measuring roughly 0.17 A)
2) How do I make sense of the value I am reading in on FreeMASTER. Currently I have the ADC input settings below:
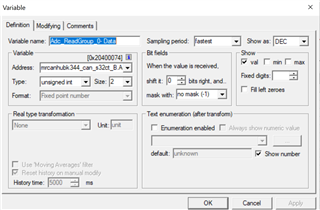
Additionally, below is how the ADC channel is configured within the S32 Configuration Tool with an ADC Channel High Limit of 4095:

My goal for this project is to be able to convert the ADC value that I am reading in on FreeMASTER to a value that is equivalent to how many amps the motor is drawing (hooked up between OUT1 and OUT2). This will allow me to develop controls in based on the value of the motor current.
Best regards,
Bravin Link