Other Parts Discussed in Thread: MCF8329EVM,
Tool/software:
Dear TI Team,
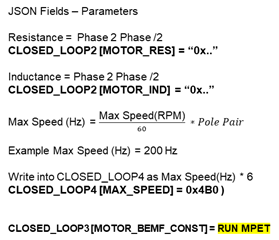
I followed the article (SLLU374 – NOVEMBER 2024) to tune my MCF8329EVM. I manually measured the Rs, Ls, and BEMF and entered the values.
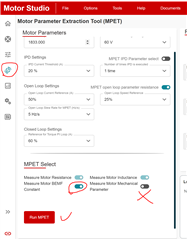
After That, I tried to run MPET. The motor rotated until the open-loop speed, returning no errors, but only zero values were obtained in MPET results.
I also tried to skip MPET measurement by following section 4.1.7.1 Skipping MPET Measurements.
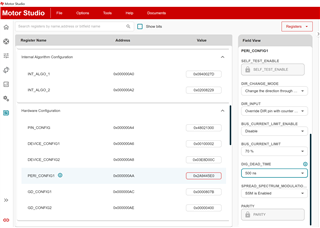
However, I cannot rotate my motor from i2c speed commands in the quick spin menu; the motor remains idle, and no fault occurs.
Let me know how I proceed.