



Tool/software:
Hi,
I had previously created the following ticket, in which it turned out that the motor is too weak for its purpose: https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1418325/mcf8316aevm-increase-starting-torque/5435393?tempkey=5f5a1ff7-b010-42a0-bbfb-72af254d9b9f
We have now received a new motor with following specifications:
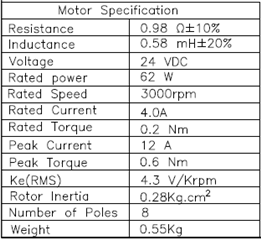
I was able to get the motor running with the pump head installed, but only until it switches to closed loop. During open loop the pump head turns and then as soon as it switches to closed loop it makes a short noise, as if it is over-revving, and then stops.
Which parameters should I change to fix this?
Best regards
Thilo FÖrster
