Tool/software:
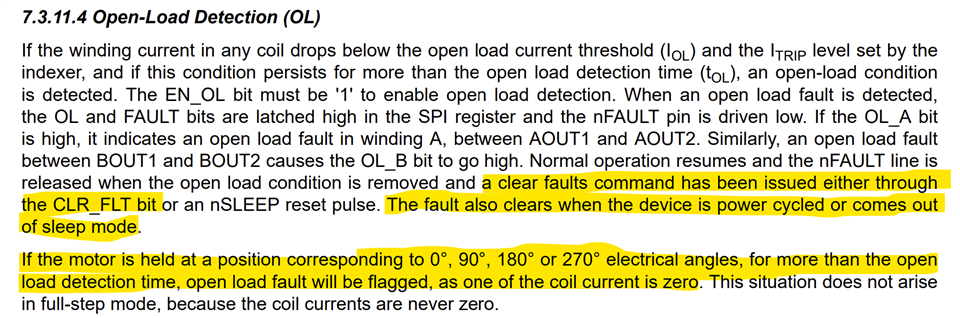
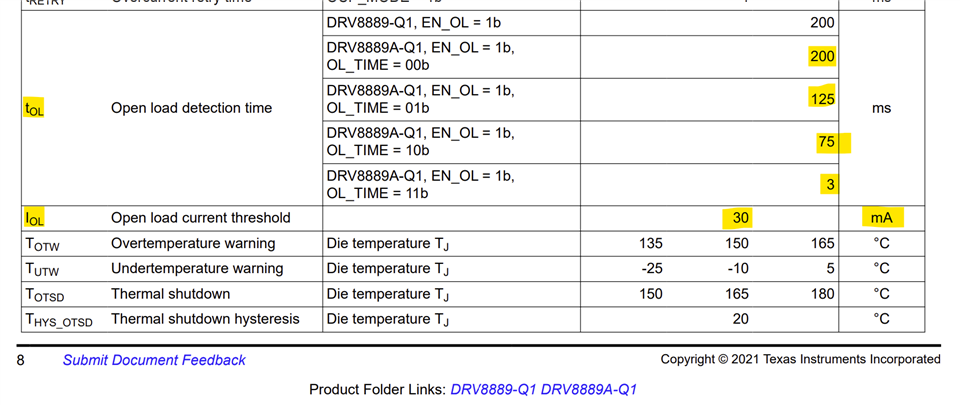
We need to detect faults in the process of using the motor driver chip DRV8889A-Q1, for example, we remove the motor, the open circuit fault is recognized, but once in the detection of faults, we connect the motor and then drive again, the fault can not be recovered, and you need to reset the software again after the detection of faults are not recognized.
We need to get specific fault recognition logic from TI, or related documents for our reference!