Tool/software:
Hi!
I have a working example I wish to replicate using the DRV8316. In my working example, I use an ST L6234 as the driver for my BLDC motor.
I set the 3 EN pins to high, and input 3 sinusoidal waveform into the IN pins, where each one is phase shifted by 120 deg from the next. The Block diagram of the L6234 can be seen below, where all of this makes sense.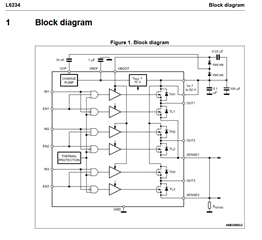
My ENx lines and INx lines follow these graphs, and I use the frequency of the sin waves to change the frequency of the motor.
I want to replicate this type of motor driving with the DRV8316, but I'm not able to get it to work properly. Specifically, I can drive my BLDC very very slowly and smoothly using the L6234. Running as low as 0.5 RPM works without issues.
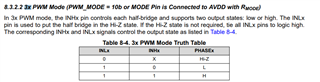
I've set the DRV8316 to 3PWM mode, so I will be able to drive it with 3 PWM inputs, but the best I've been able to achive is to:
1. The motor will not rotate if starting the PWM at low frequencies (matching low speeds). I first need to set the input PWM frequency high, get the motor to start rotating and only then will it rotate slowly.
2. The movement is very choppy and not smooth.
I should mention that my use case is a BLDC at very low speeds, very light load, and without any change in load during rotation.
Could you tell me how I could replicate the working mode of the L6234 using the DRV8316?