Other Parts Discussed in Thread: TMS320F280025C, LAUNCHXL-F280025C
Tool/software:
Dear TI Team,
I am running a BLDC motor at a very low speed of approximately 0.15 RPM and need to monitor its position over time with a resolution of 1 ms. While attempting to achieve this, I initially explored your graph tool but the resolution is to low so I try a different approach.
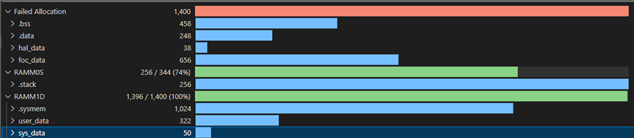
Using the Universal Motor Control Lab ,with TMS320F280025C, DRV8316EVMR I have been working to integrate your UART example. However, I encountered memory issues during the merging process (please see the attached image for reference).
Is there an alternative way to allocate memory or manage resources to successfully combine these examples?
Thank you for your support and guidance.
Best regards,
before 
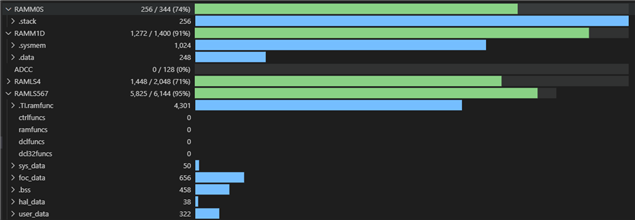
After using uncomment add_device method (file.h)