Other Parts Discussed in Thread: DRV8434, DRV8825, DRV8424
Tool/software:
Hi Team,
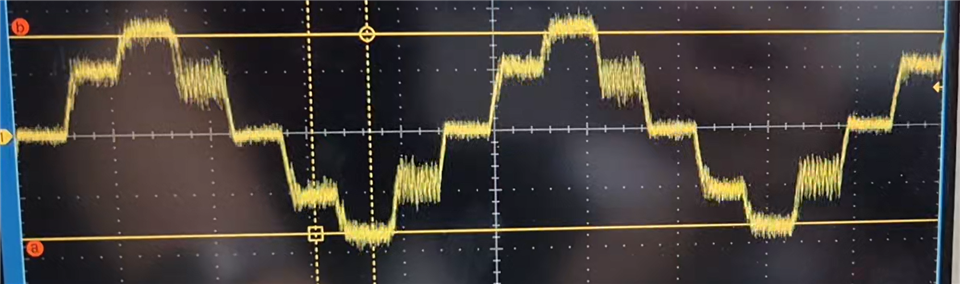
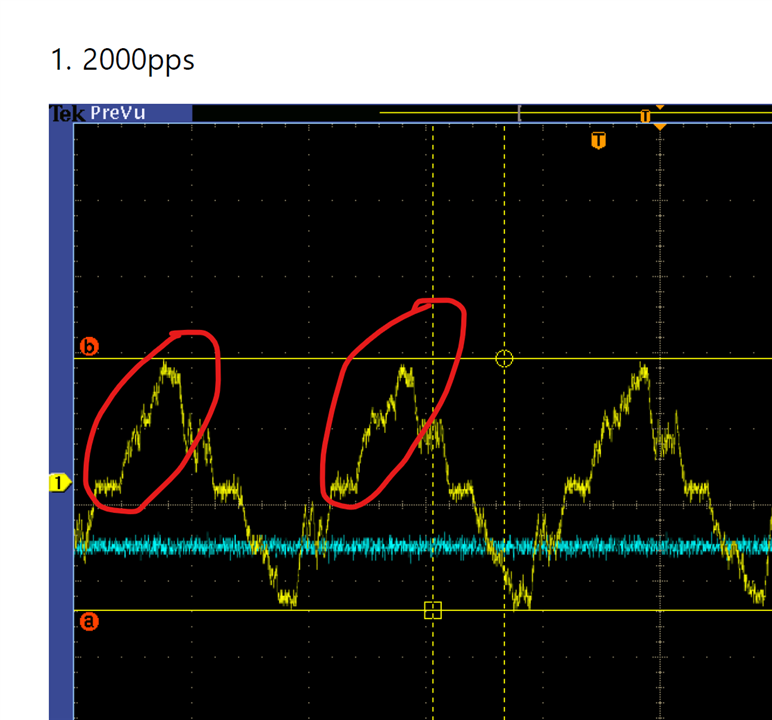
There is low current issue of bridge A on customer's board with DRV8818. They are verifying DRV8818 under condition of 1000pps to 5500pps, but the current of bridge A is decreasing after about 3500~4000pps. Please check the schematic and video clip of attachment below, and let me know how to resolve this issue.
Low current issue of bridge A.docx
Regards,