Hello,
I have DRV8889-Q1EVM and operate Bipolar Stepper motor through SPI Protocol.
NOTE:- I am operating DRV8889 of EVM through external MCU instead of on-board MCU(MSP430).
I have some queries to operate Motor by SPI.
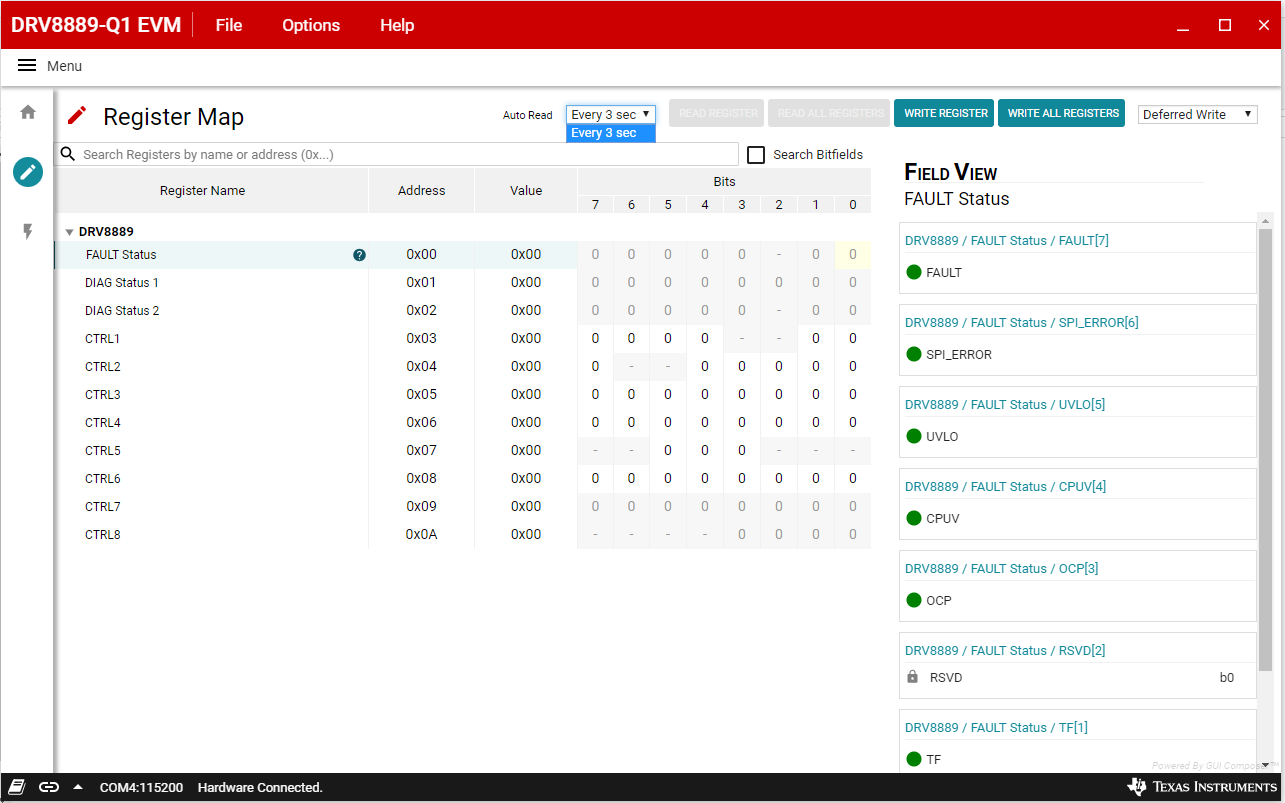
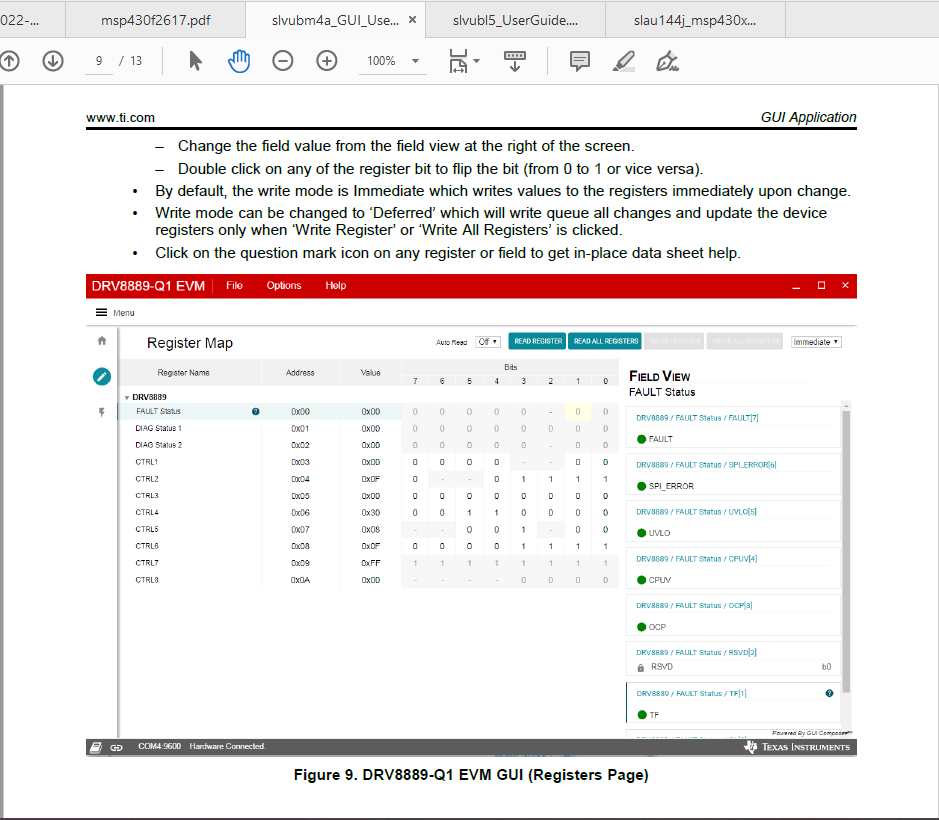
Q-1 In CTRL3, bit 7 is for DIR and description says "Direction input. Logic '1' sets the direction of stepping, when SPI_DIR = 1".
So here which direction (clock or Anti-clock) is indicated by this bit?
Q-2 I need the full detailed description to configure registers using SPI as the datasheet has not enough information.
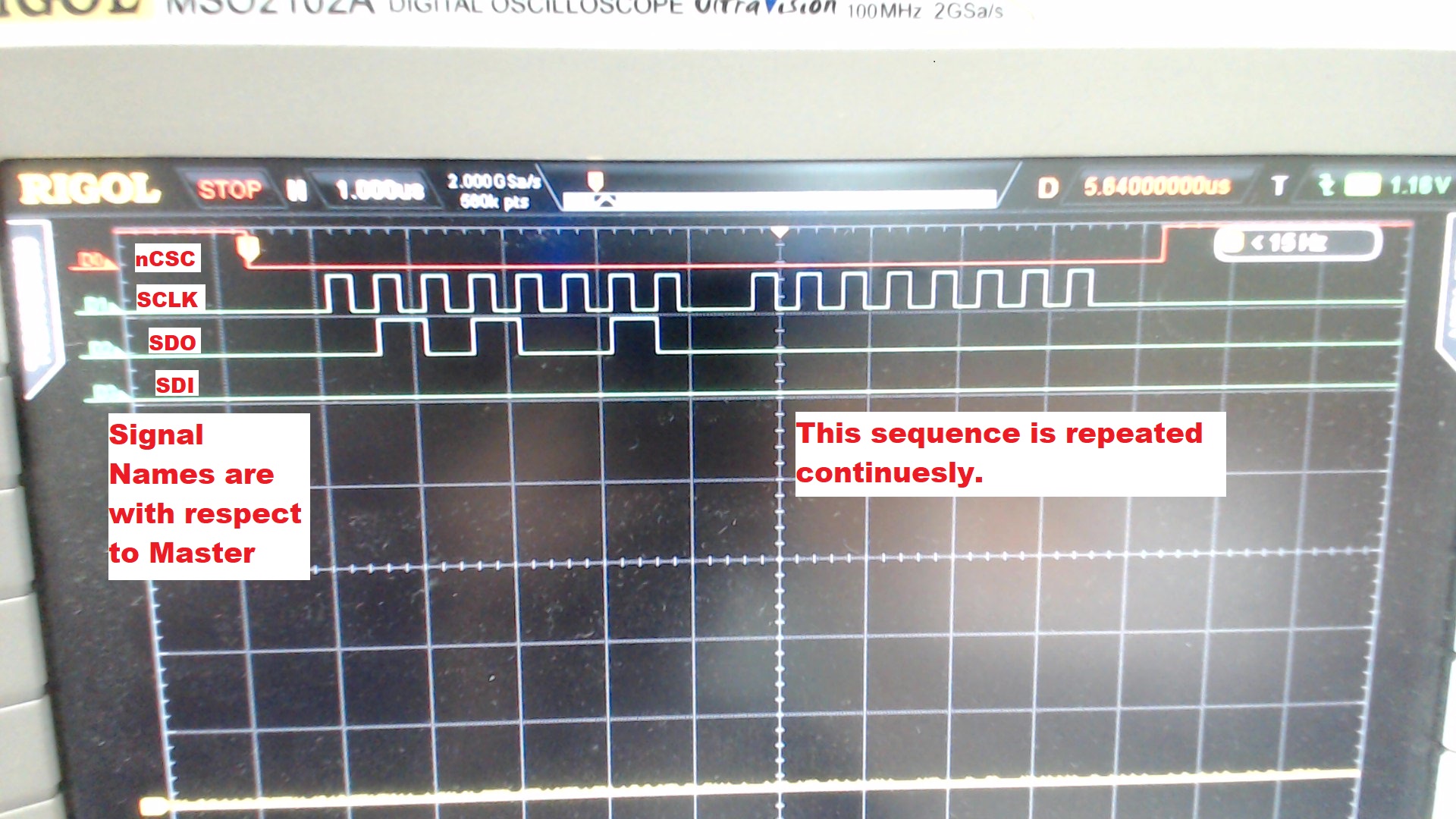
Q-3 Do we have to wait for transaction completion after sending first 8 bits?
Q-4 After power-on the EVM, when I read the CTRL3 register through SPI, received the bit set for the SPI_DIR & SPI_STEP. So Is it correct or Is there any error in reading register?
(Here I am sending the 16 bits at a time).
Regards,
Alpesh