Other Parts Discussed in Thread: LAUNCHXL-F28069M, , DRV8305, CONTROLSUITE
Hi, I've searched through forums and tried all related solutions but nothing seems applicable to my situation
I'm using a custom power board together with LAUNCHXL-F28069M as the control board, while using InstaSPIN-FOC and following the lab guides.
Circuit Diagram Here:
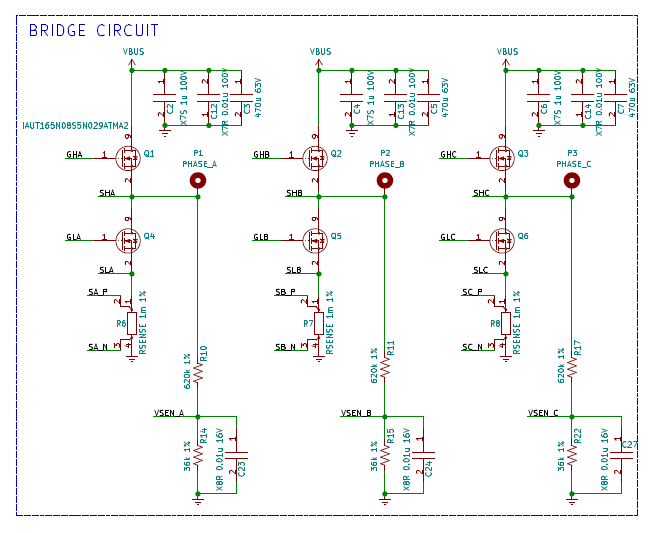
DRV8353 Circuit:

When running Lab01c of the InstaSPIN-FOC (closed-loop current control for signal chain verification), I'm getting a gate drive fault (GDF) from the DRV8305 when the motor was about to spin. What's weird is I'm getting the fault at a specific MOSFET (GL_C) every single time.
My Settings/Parts:
1. Gate drive currents set at (IDRIVEN_LS and HS=900mA, IDRIVEP_LS and HS=750mA)
→ This I get from increasing slowly 150mA to get a fairly acceptable rise time of about ~100nS.
2. All other settings of DRV8353 are set to Default.
3. Using InstaSPIN-FOC @ 45KHz PWM Frequency.
4. Using a IAUT165N08S5N029ATMA2 MOSFET.
5. Power supply is LiPo Battery 4s (about 14.8V ), but alternating between DC power supply of 14.8V.
What I did so far:
1. Tried running the motor using InstaSPIN Lab01b and was successful of spinning the motor.
2. Tried running Lab01c, Lab03x, Lab02x, all same results as described above (motor spins a LITTLE bit (not even half a rotation), then stops due to fault.
3. Tried running on DC power supply (see #5 above), I got a GDF for VG_LC and a UVLO fault on top of that. I only get GDF for VG_LC when running on batteries.
4. Motor should spin using the same parameters because it spins without problems using the same lab exercise but with TI's EVM board.
5. Board is still running and programmable. Tried reproducing with another board but ended up burning the DRV8353 due to improperly setting the drive currents. Will try again after changing the IC.
6. Tried spinning even with the minimum IDRIVE settings, and got the same result. I'm having doubts on increasing IDRIVE further as they may cook the DRV8353 just like what happened to the other boards. Plus, when the gate drive waveforms are checked with Lab01b, they turn on in a timely manner as expected.
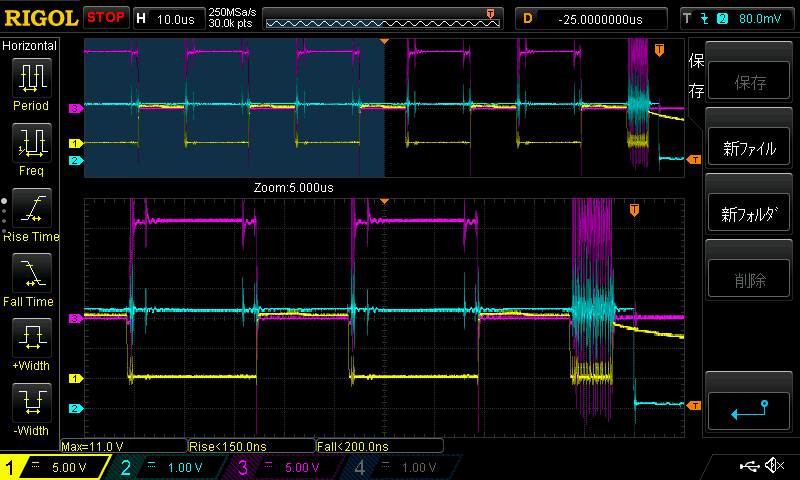
Waveform:
So I tried capturing the gate drive VG_LC, the motor terminal voltage at C, and the FAULT pin just before the error has occurred.
- Channel 1 (Yellow) is gate drive C
- Channel 2 (Skyblue) is
- Channel 3 (Pink) is Vc (terminal voltage at C)
As you can see, in the last cycle I encountered some weird ringing on the gate drive which in turn falsely triggers the MOSFET (or so I'm thinking), disrupting the signal chain.
What's weird is that the weird noise also appeared on the FAULT signal.
I'd really appreciate if anyone of you would give any hints/ideas/suggestions on how I may further debug this problem.
Motor Parameters (just in case):
Motor: Sunnysky_X2814_900KV
(these settings are copied straight out of user_j5.h):
#define USER_MOTOR_TYPE MOTOR_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (7)
#define USER_MOTOR_Rr (NULL)
#define USER_MOTOR_Rs (0.0267539211)
#define USER_MOTOR_Ls_d (0.00000774756154)
#define USER_MOTOR_Ls_q (USER_MOTOR_Ls_d)
#define USER_MOTOR_RATED_FLUX (0.0059499098)
#define USER_MOTOR_MAGNETIZING_CURRENT (NULL)
#define USER_MOTOR_RES_EST_CURRENT (5.0)
#define USER_MOTOR_IND_EST_CURRENT (-5.0)
#define USER_MOTOR_MAX_CURRENT (20.0)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (20.0)