Other Parts Discussed in Thread: MSP430F5529
Tool/software: Code Composer Studio
Hello,
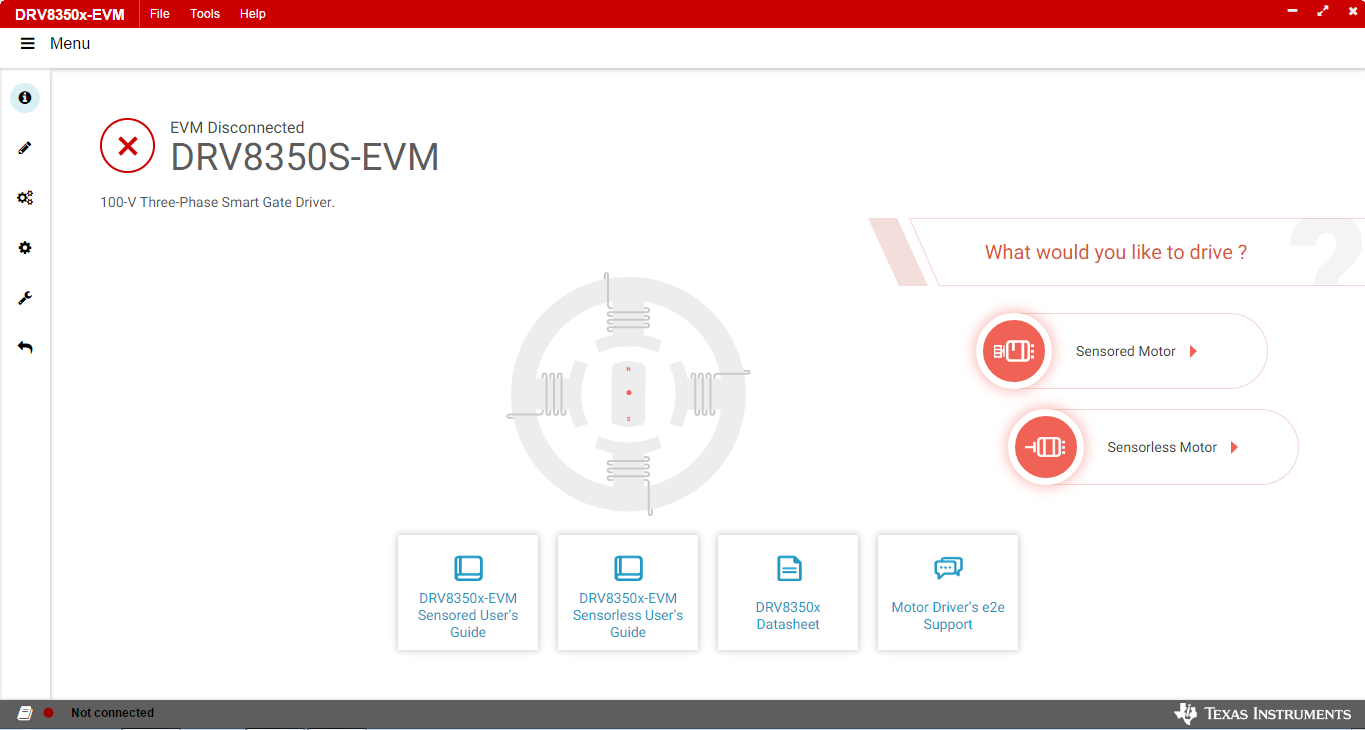
I'm currently working with DRV8350S-EVM and trying to operate it in sensored mode. In my setup I have downloaded the GUI and I'm giving 5 V supply to hall sensor using the on-board option available through the 3 pin header. When I start the GUI the driver-motor system is automatically configured as sensorless after COM port detection and enabling, after which the sensored option is not visible in the GUI.
I wanted to know whether there are any other hardware or software configuration that I'm missing in order for the EVM to work in sensored mode?
Regards,
Abhishek K Singh