- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

I am trying to develop a 1.2Kw motor driver fir that I ordered one drv8350s evm
Today I recived my drv8350s evm and then I start running the board using example code as per ti web side and for control using the pc application downloaded from ti web site.
Motor voltage = 60v
Current is approx 2 amps
6x pwm mode
Sensored control
Motor start spining and suddenly I change the direction and then I got gate drv fault.
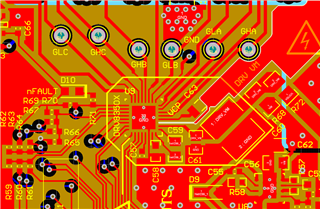
Tried lot of times to clear the fault using spi as well power off the board for 10 min but every time I enable the gate driver its showing gate drv fault, specifically on Phase C low side
All gate drv Current and other setting are default as in example code
Please guide me for next steps for debugging
Also it will be great help if you can provide me state machine diagram for drv8350s sensored based motor control firmware
Thanks in advance