Other Parts Discussed in Thread: BQSTUDIO, BQ34Z100-G1
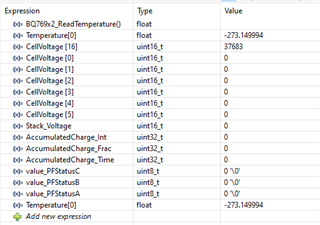
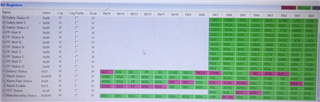
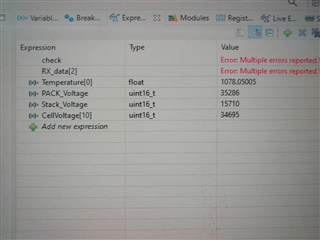
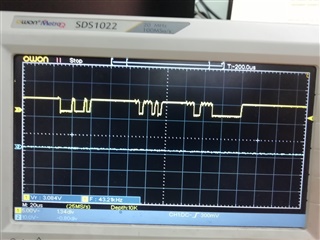
Hello sir , for long time I am trying to communicate with BQ76952 with STM32F103 viz. I2C while communication I also connect the oscilloscope to watch the SDL and SCL and I attached the image also , after setup of the same I always getting unwanted (out of my understanding) data (eg.cell reading ,temperature) Like that.
7880 mV
7880 mV
7880 mV
7880 mV
10450 mV
10450 mV
10450 mV
10450 mV
10450 mV
10450 mV
7880 mV
7880 mV
7880 mV
7880 mV

,
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2023 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include <stdio.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define DEV_ADDR 0x10 // BQ769x2 address is 0x10 including R/W bit or 0x8 as 7-bit address
#define CRC_Mode 0 // 0 for disabled, 1 for enabled
#define MAX_BUFFER_SIZE 10
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
TIM_HandleTypeDef htim1;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
uint8_t spiData [2];
uint8_t spiRxData [2];
uint8_t rxdata [2];
uint8_t busyData [2] = {0xFF, 0xFF};
uint8_t TX_2Byte [2] = {0x00, 0x00};
uint8_t TX_3Byte [3] = {0x00, 0x00, 0x00};
uint8_t TX_4Byte [4] = {0x00, 0x00, 0x00, 0x00};
uint8_t TX_Buffer [MAX_BUFFER_SIZE] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
uint8_t RX_2Byte [2] = {0x00, 0x00};
uint8_t RX_3Byte [3] = {0x00, 0x00, 0x00};
uint8_t RX_4Byte [4] = {0x00, 0x00, 0x00, 0x00};
uint8_t RX_12Byte [12] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
uint8_t RX_Buffer [MAX_BUFFER_SIZE] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned int RX_CRC_Check = 0;
// Variables for cell voltages, temperatures, CC2 current, Stack voltage, PACK Pin voltage, LD Pin voltage
uint16_t CellVoltage [16] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
float Temperature [3] = {0,0,0};
float FET_Temperature = 0;
uint16_t Stack_Voltage = 0x00;
uint16_t LD_Voltage = 0x00;
uint16_t PACK_Voltage = 0x00;
uint16_t PACK_Current = 0x00;
uint16_t AlarmBits = 0x00;
uint8_t SafetyStatusA; // Safety Status Register A
uint8_t SafetyStatusB; // Safety Status Register B
uint8_t SafetyStatusC; // Safety Status Register C
uint8_t PFStatusA; // Permanent Fail Status Register A
uint8_t PFStatusB; // Permanent Fail Status Register B
uint8_t PFStatusC; // Permanent Fail Status Register C
uint8_t FET_Status; // FET Status register contents See TRM Section 12.2.20 - Shows states of FETs
uint16_t CB_ActiveCells; // Cell Balancing Active Cells
uint16_t DEVICE_NUMBER;
uint8_t UV_Fault = 0; // under-voltage fault state
uint8_t OV_Fault = 0; // over-voltage fault state
uint8_t SCD_Fault = 0; // short-circuit fault state
uint8_t OCD_Fault = 0; // over-current fault state
uint8_t LD_ON = 0; // Load Detect status bit
uint8_t DCHG = 0; // discharge FET state
uint8_t CHG = 0; // charge FET state
uint8_t PCHG = 0; // pre-charge FET state
uint8_t PDSG = 0; // pre-discharge FET state
uint32_t AccumulatedCharge_Int;
uint32_t AccumulatedCharge_Frac;
uint32_t AccumulatedCharge_Time;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_TIM1_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void uprint(char * str)
{
HAL_UART_Transmit(&huart1, (uint8_t*)str, strlen(str), 100);
}
/* USER CODE END 0 */
void delayUS(uint32_t us) { // Sets the delay in microseconds.
__HAL_TIM_SET_COUNTER(&htim1,0); // set the counter value a 0
while (__HAL_TIM_GET_COUNTER(&htim1) < us); // wait for the counter to reach the us input in the parameter
}
void delay_ticks(uint32_t ticks)
{
SysTick->LOAD = ticks;
SysTick->VAL = 0;
SysTick->CTRL = SysTick_CTRL_ENABLE_Msk;
// COUNTFLAG is a bit that is set to 1 when counter reaches 0.
// It's automatically cleared when read.
while ((SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk) == 0);
SysTick->CTRL = 0;
}
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count)
{
uint8_t copyIndex = 0;
for (copyIndex = 0; copyIndex < count; copyIndex++)
{
dest[copyIndex] = source[copyIndex];
}
}
unsigned char Checksum(unsigned char *ptr, unsigned char len)
// Calculates the checksum when writing to a RAM register. The checksum is the inverse of the sum of the bytes.
{
unsigned char i;
unsigned char checksum = 0;
for(i=0; i<len; i++)
checksum += ptr[i];
checksum = 0xff & ~checksum;
return(checksum);
}
unsigned char CRC8(unsigned char *ptr, unsigned char len)
{
unsigned char i;
unsigned char crc=0;
while(len--!=0)
{
for(i=0x80; i!=0; i/=2)
{
if((crc & 0x80) != 0)
{
crc *= 2;
crc ^= 0x107;
}
else
crc *= 2;
if((*ptr & i)!=0)
crc ^= 0x107;
}
ptr++;
}
return(crc);
}
void I2C_WriteReg(uint8_t reg_addr, uint8_t *reg_data, uint8_t count)
{
#if CRC_Mode
{
uint8_t crc_count = 0;
crc_count = count * 2;
uint8_t crc1stByteBuffer [3] = {0x10, reg_addr, reg_data[0]};
unsigned int j;
unsigned int i;
uint8_t temp_crc_buffer [3];
TX_Buffer[0] = reg_data[0];
TX_Buffer[1] = CRC8(crc1stByteBuffer,3);
j = 2;
for(i=1; i<count; i++)
{
TX_Buffer[j] = reg_data[i];
j = j + 1;
temp_crc_buffer[0] = reg_data[i];
TX_Buffer[j] = CRC8(temp_crc_buffer,1);
j = j + 1;
}
HAL_I2C_Mem_Write(&hi2c1, DEV_ADDR, reg_addr, 1, TX_Buffer, count, 1000);
}
#endif
#if CRC_Mode < 1
HAL_I2C_Mem_Write(&hi2c1, DEV_ADDR, reg_addr, 1, reg_data, count, 1000);
#endif
}
int I2C_ReadReg(uint8_t reg_addr, uint8_t *reg_data, uint8_t count)
{
unsigned int RX_CRC_Fail = 0; // reset to 0. If in CRC Mode and CRC fails, this will be incremented.
#if CRC_Mode
{
uint8_t crc_count = 0;
uint8_t ReceiveBuffer [10] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
crc_count = count * 2;
unsigned int j;
unsigned int i;
unsigned char CRCc = 0;
uint8_t temp_crc_buffer [3];
HAL_I2C_Mem_Read(&hi2c1, DEV_ADDR, reg_addr, 1, ReceiveBuffer, crc_count, 1000);
uint8_t crc1stByteBuffer [4] = {0x10, reg_addr, 0x11, ReceiveBuffer[0]};
CRCc = CRC8(crc1stByteBuffer,4);
if (CRCc != ReceiveBuffer[1])
RX_CRC_Fail += 1;
RX_Buffer[0] = ReceiveBuffer[0];
j = 2;
for (i=1; i<count; i++)
{
RX_Buffer[i] = ReceiveBuffer[j];
temp_crc_buffer[0] = ReceiveBuffer[j];
j = j + 1;
CRCc = CRC8(temp_crc_buffer,1);
if (CRCc != ReceiveBuffer[j])
RX_CRC_Fail += 1;
j = j + 1;
}
CopyArray(RX_Buffer, reg_data, crc_count);
}
#endif
#if CRC_Mode < 1
HAL_I2C_Mem_Read(&hi2c1, DEV_ADDR, reg_addr, 1, reg_data, count, 1000);
#endif
return 0;
}
void AFE_Reset() {
// Reset command. Resets all registers to default values or the values programmed in OTP.
TX_2Byte[0] = 0x12; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_Init() {
// Configures all parameters in device RAM
// Enter CONFIGUPDATE mode (Subcommand 0x0090) - It is required to be in CONFIG_UPDATE mode to program the device RAM settings
// See TRM Section 7.6 for full description of CONFIG_UPDATE mode
TX_2Byte[0] = 0x90; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
delayUS(2000);
// After entering CONFIG_UPDATE mode, RAM registers can be programmed. When programming RAM, checksum and length must also be
// programmed for the change to take effect. All of the RAM registers are described in detail in Chapter 13 of the BQ76952 TRM.
// An easier way to find the descriptions is in the BQStudio Data Memory screen. When you move the mouse over the register name,
// a full description of the register and the bits will pop up on the screen.
// A summary of the Data Memory is also in Section 13.9 of the TRM.
// 'Power Config' - Set DSLP_LDO - 0x9234 = 0x2D82 (See TRM section 13.3.2)
// Setting the DSLP_LDO bit allows the LDOs to remain active when the device goes into Deep Sleep mode
TX_4Byte[0] = 0x34; TX_4Byte[1] = 0x92; TX_4Byte[2] = 0x82; TX_4Byte[3] = 0x2D;
I2C_WriteReg(0x3E, TX_4Byte, 4);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_4Byte, 4); TX_2Byte[1] = 0x06; // Checksum and Length
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// 'REG0 Config' - set REG0_EN bit to enable pre-regulator
TX_3Byte[0] = 0x37; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x01;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// 'REG12 Config' - Enable REG1 with 3.3V output
TX_3Byte[0] = 0x36; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x0D;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// 'VCell Mode' - Enable 16 cells - 0x9304 = 0x0000 (See TRM section 13.3.2.19)
// 0x0000 sets the default value of 16 cells.
TX_4Byte[0] = 0x04; TX_4Byte[1] = 0x93; TX_4Byte[2] = 0x00; TX_4Byte[3] = 0x00;
I2C_WriteReg(0x3E, TX_4Byte, 4);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_4Byte, 4); TX_2Byte[1] = 0x06; // Checksum and Length
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// 'Default Alarm Mask' - Enable FullScan and ADScan bits
// 0xF882
TX_4Byte[0] = 0x6D; TX_4Byte[1] = 0x92; TX_4Byte[2] = 0x82; TX_4Byte[3] = 0xF8;
I2C_WriteReg(0x3E, TX_4Byte, 4);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_4Byte, 4); TX_2Byte[1] = 0x06; // Checksum and Length
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Enable protections in 'Enabled Protections A' 0x9261 = 0xBC (See TRM section 13.3.3.2)
// Enables SCD (short-circuit), OCD1 (over-current in discharge), OCC (over-current in charge),
// COV (over-voltage), CUV (under-voltage)
TX_3Byte[0] = 0x61; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0xFC;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Enable all protections in 'Enabled Protections B' 0x9262 = 0xF7 (See TRM section 13.3.3.3)
// Enables OTF (over-temperature FET), OTINT (internal over-temperature), OTD (over-temperature in discharge),
// OTC (over-temperature in charge), UTINT (internal under-temperature), UTD (under-temperature in discharge), UTC (under-temperature in charge)
TX_3Byte[0] = 0x62; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0xF7;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set TS1 to measure Cell Temperature - 0x92FD = 0x07 (See TRM Section 13.3.2.12)
TX_3Byte[0] = 0xFD; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x07;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set TS3 to measure FET Temperature - 0x92FF = 0x0F (See TRM Section 13.3.2.14)
TX_3Byte[0] = 0xFF; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x0F;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set DFETOFF pin to control BOTH CHG and DSG FET - 0x92FB = 0x42 (set to 0x00 to disable)
// See TRM section 13.3.2.10, Table 13-7
TX_3Byte[0] = 0xFB; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x42;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set up Alert Pin - 0x92FC = 0x2A - See TRM Section 13.3.2.11, Table 13-8
// This configures the Alert pin to drive high (REG1 voltage) when enabled.
// Other options available include active-low, drive HiZ, drive using REG18 (1.8V), weak internal pull-up and pull-down
TX_3Byte[0] = 0xFC; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x2A;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set up Cell Balancing Configuration - 0x9335 = 0x03 - Automated balancing while in Relax or Charge modes
// See TRM Section 13.3.11. Chapter 10 of TRM describes Cell Balancing in detail
// Also see "Cell Balancing with BQ76952, BQ76942 Battery Monitors" document on ti.com
TX_3Byte[0] = 0x35; TX_3Byte[1] = 0x93; TX_3Byte[2] = 0x03;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set up COV (over-voltage) Threshold - 0x9278 = 0x55 (4301 mV)
// COV Threshold is this value multiplied by 50.6mV See TRM section 13.6.2
TX_3Byte[0] = 0x78; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x55;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set up SCD Threshold - 0x9286 = 0x05 (100 mV = 100A across 1mOhm sense resistor)
// See TRM section 13.6.7 0x05=100mV
TX_3Byte[0] = 0x86; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x05;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set up SCD Delay - 0x9287 = 0x03 (30 us) See TRM section 13.6.7
// Units of 15us
TX_3Byte[0] = 0x87; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x03;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Set up SCDL Latch Limit to 1 to set SCD recovery only with load removal 0x9295 = 0x01
// If this is not set, then SCD will recover based on time (SCD Recovery Time parameter).
// See TRM section 13.6.11.1
TX_3Byte[0] = 0x95; TX_3Byte[1] = 0x92; TX_3Byte[2] = 0x01;
I2C_WriteReg(0x3E, TX_3Byte, 3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
delayUS(1000);
// Exit CONFIGUPDATE mode - Subcommand 0x0092
TX_2Byte[0] = 0x92; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
delayUS(1000);
}
// ********************************* FET Control Commands ***************************************
void AFE_FET_ENABLE() {
// Toggles the FET_EN bit in the Manufacturing Status register. So this command can be used to enable or disable the FETs.
TX_2Byte[0] = 0x22; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_FET_Control(uint8_t FET_states) { // Bit3 = PCHG_OFF, Bit 2 = CHG_OFF, Bit1 = PDSG_OFF, Bit 0 = DSG_OFF
TX_3Byte[0] = 0x97; TX_3Byte[1] = 0x00; TX_3Byte[2] = FET_states;
I2C_WriteReg(0x3E,TX_3Byte,3);
delayUS(1000);
TX_2Byte[0] = Checksum(TX_3Byte, 3); TX_2Byte[1] = 0x05;
I2C_WriteReg(0x60, TX_2Byte, 2);
}
void DSG_PDSG_OFF() {
// Disable discharge (and pre-discharge) FETs
// Subcommand 0x0093 See TRM Table 5-8 (DSG_PDSG_OFF())
TX_2Byte[0] = 0x93; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void CHG_PCHG_OFF() {
// Disable charge (and pre-charge) FETs
// Subcommand 0x0094 See TRM Table 5-8 (CHG_PCHG_OFF())
TX_2Byte[0] = 0x94; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_ALL_FETS_OFF() {
// Disable all FETs with command 0x0095 See TRM Table 5-8
TX_2Byte[0] = 0x95; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_ALL_FETS_ON() {
// All all FETs to be enabled with command 0x0096 See TRM Table 5-8
TX_2Byte[0] = 0x96; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_BOTHOFF () {
// Disables all FETs using the DFETOFF (BOTHOFF) pin
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_SET); // DFETOFF pin (BOTHOFF) set low
}
void AFE_RESET_BOTHOFF () {
// Resets DFETOFF (BOTHOFF) pin
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET); // DFETOFF pin (BOTHOFF) set low
}
void AFE_ReadFETStatus() {
// Read FET Status to see which FETs are enabled
I2C_ReadReg(0x7F, RX_2Byte, 2);
FET_Status = (RX_2Byte[1]*256 + RX_2Byte[0]);
DCHG = 0x4 & RX_2Byte[0]; // discharge FET state
CHG = 0x1 & RX_2Byte[0]; // charge FET state
PCHG = 0x2 & RX_2Byte[0]; // pre-charge FET state
PDSG = 0x8 & RX_2Byte[0]; // pre-discharge FET state
}
// ********************************* End of FET Control Commands *********************************
// ********************************* AFE Cell Balancing Commands *****************************************
void CB_ACTIVE_CELLS() {
// Check status of which cells are balancing
TX_2Byte[0] = 0x83; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
I2C_ReadReg(0x40, RX_2Byte, 2);
CB_ActiveCells = (RX_2Byte[1]*256 + RX_2Byte[0]);
}
// ********************************* End of AFE Cell Balancing Commands *****************************************
// ********************************* AFE Power Commands *****************************************
void AFE_DeepSleep() {
// Puts the device into DEEPSLEEP mode. See TRM section 7.4
TX_2Byte[0] = 0x0F; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_ExitDeepSleep() {
// Exits DEEPSLEEP mode. See TRM section 7.4
TX_2Byte[0] = 0x0E; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_ShutdownCommand() {
// Puts the device into SHUTDOWN mode. See TRM section 7.5
TX_2Byte[0] = 0x10; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_ShutdownPin() {
// Puts the device into SHUTDOWN mode using the RST_SHUT pin
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_SET); // Sets RST_SHUT pin
}
void AFE_ReleaseShutdownPin() {
// Releases the RST_SHUT pin
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_RESET); // Resets RST_SHUT pin
}
void AFE_SLEEP_ENABLE() { // SLEEP_ENABLE 0x0099
// Allows the device to enter Sleep mode if current is below Sleep Current. See TRM section 7.3
TX_2Byte[0] = 0x99; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
void AFE_SLEEP_DISABLE() { // SLEEP_DISABLE 0x009A
// Takes the device out of sleep mode. See TRM section 7.3
TX_2Byte[0] = 0x9A; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
// ********************************* End of AFE Power Commands *****************************************
// ********************************* AFE Status and Fault Commands *****************************************
uint16_t AFE_ReadAlarmStatus() {
// Read this register to find out why the Alert pin was asserted. See section 6.6 of the TRM for full description.
I2C_ReadReg(0x62, RX_2Byte, 2);
return (RX_2Byte[1]*256 + RX_2Byte[0]);
}
void AFE_ReadSafetyStatus() {
// Read Safety Status A/B/C and find which bits are set
// This shows which primary protections have been triggered
I2C_ReadReg(0x03, RX_2Byte, 2);
SafetyStatusA = (RX_2Byte[1]*256 + RX_2Byte[0]);
UV_Fault = 0x4 & RX_2Byte[0];
OV_Fault = 0x8 & RX_2Byte[0];
SCD_Fault = 0x8 & RX_2Byte[1];
OCD_Fault = 0x2 & RX_2Byte[1];
I2C_ReadReg(0x05, RX_2Byte, 2);
SafetyStatusB = (RX_2Byte[1]*256 + RX_2Byte[0]);
I2C_ReadReg(0x07, RX_2Byte, 2);
SafetyStatusC = (RX_2Byte[1]*256 + RX_2Byte[0]);
}
void AFE_ReadPFStatus() {
// Read Permanent Fail Status A/B/C and find which bits are set
// This shows which permanent failures have been triggered
I2C_ReadReg(0x0B, RX_2Byte, 2);
PFStatusA = (RX_2Byte[1]*256 + RX_2Byte[0]);
I2C_ReadReg(0x0D, RX_2Byte, 2);
PFStatusB = (RX_2Byte[1]*256 + RX_2Byte[0]);
I2C_ReadReg(0x0F, RX_2Byte, 2);
PFStatusC = (RX_2Byte[1]*256 + RX_2Byte[0]);
}
void AFE_ControlStatus() {
// Control status register - Bit0 - LD_ON (load detected)
// See TRM Table 6-1
I2C_ReadReg(0x00, RX_2Byte, 2);
LD_ON = 0x1 & RX_2Byte[0];
}
void AFE_BatteryStatus() {
// Battery status register - See TRM Table 6-2
I2C_ReadReg(0x12, RX_2Byte, 2);
}
void AFE_ClearFaults() {
TX_2Byte[0] = 0x00; TX_2Byte[1] = 0xF8;
I2C_WriteReg(0x62,TX_2Byte,2);
}
void AFE_ClearScanBits() {
TX_2Byte[0] = 0x82; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x62,TX_2Byte,2);
}
void AFE_PFReset() {
TX_2Byte[0] = 0x29; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
uint16_t AFE_DeviceID() {
// Read Device ID using Subcommand 0x0001
TX_2Byte[0] = 0x01; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
delayUS(500);
I2C_ReadReg(0x40, RX_2Byte, 2);
return (RX_2Byte[1]*256 + RX_2Byte[0]);
}
// ********************************* End of AFE Status and Fault Commands *****************************************
// ********************************* AFE Measurement Commands *****************************************
uint16_t AFE_ReadCellVoltage(uint8_t channel) {
I2C_ReadReg(channel*2+0x12, RX_2Byte, 2);
return (RX_2Byte[1]*256 + RX_2Byte[0]); // cell voltage is reported in mV
}
uint16_t AFE_ReadStackVoltage() {
I2C_ReadReg(0x34, RX_2Byte, 2);
return 10 * (RX_2Byte[1]*256 + RX_2Byte[0]); // voltage is reported in 0.01V units
}
uint16_t AFE_ReadPackVoltage() {
I2C_ReadReg(0x36, RX_2Byte, 2);
return 10 * (RX_2Byte[1]*256 + RX_2Byte[0]); // voltage is reported in 0.01V units
}
uint16_t AFE_ReadLDVoltage() {
I2C_ReadReg(0x38, RX_2Byte, 2);
return 10 * (RX_2Byte[1]*256 + RX_2Byte[0]); // voltage is reported in 0.01V units
}
uint16_t AFE_ReadCurrent() {
I2C_ReadReg(0x3A, RX_2Byte, 2);
return (RX_2Byte[1]*256 + RX_2Byte[0]); // current is reported in mA
}
float AFE_ReadTemperature(uint8_t channel) {
switch(channel)
{
case 0:
I2C_ReadReg(0x70, RX_2Byte, 2); // TS1 pin
break;
case 1:
I2C_ReadReg(0x74, RX_2Byte, 2); // TS3 pin, FET temperature
break;
default: break;
}
return (0.1 * (float)(RX_2Byte[1]*256 + RX_2Byte[0])) - 273.15; // convert from 0.1K to Celcius
}
void AFE_ReadPassQ() {
// Read Accumulated Charge and Time from DASTATUS6 (See TRM Table 4-6)
TX_2Byte[0] = 0x76; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
delayUS(1000);
I2C_ReadReg(0x40, RX_12Byte, 12);
AccumulatedCharge_Int = ((RX_12Byte[3]<<24) + (RX_12Byte[2]<<16) + (RX_12Byte[1]<<8) + RX_12Byte[0]);
AccumulatedCharge_Frac = ((RX_12Byte[7]<<24) + (RX_12Byte[6]<<16) + (RX_12Byte[5]<<8) + RX_12Byte[4]);
AccumulatedCharge_Time = ((RX_12Byte[11]<<24) + (RX_12Byte[10]<<16) + (RX_12Byte[9]<<8) + RX_12Byte[8]);
}
void AFE_ClearPassQ() {
// Clear Accumulated Charge and Time, command 0x0082
TX_2Byte[0] = 0x82; TX_2Byte[1] = 0x00;
I2C_WriteReg(0x3E,TX_2Byte,2);
}
// *********************************
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t I2C_Return;
/* USER CODE END 1 */
volatile int i = 0;
char uart_buf[50];
int uart_buf_len;
/* USER CODE END 1 */
uint16_t CellVoltage1 =0;
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_TIM1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start(&htim1);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_RESET); // RST_SHUT pin set low
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET); // DFETOFF pin (BOTHOFF) set low
delayUS(10000);
AFE_Reset();
delayUS(60000);
AFE_Init();
delayUS(10000);
AFE_FET_ENABLE();
delayUS(10000);
AFE_SLEEP_DISABLE();
delayUS(60000); delayUS(60000); delayUS(60000); delayUS(60000); //wait to start measurements after FETs close
CellVoltage[1] = AFE_ReadCellVoltage(1);
CellVoltage[5] = AFE_ReadCellVoltage(5);
CellVoltage[10] = AFE_ReadCellVoltage(10);
Stack_Voltage = AFE_ReadStackVoltage();
PACK_Voltage = AFE_ReadPackVoltage();
LD_Voltage = AFE_ReadLDVoltage();
PACK_Current = AFE_ReadCurrent();
Temperature[0] = AFE_ReadTemperature(0)m ;
FET_Temperature = AFE_ReadTemperature(1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
CellVoltage1 =0;
/* USER CODE END WHILE */
CellVoltage1 = AFE_ReadCellVoltage(1);
Stack_Voltage = AFE_ReadStackVoltage();
//Debug code - prints the Cell1 Voltage to a terminal window
uart_buf_len = sprintf(uart_buf, "%u mV\r\n", Temperature[1] );
HAL_UART_Transmit(&huart1, (uint8_t *)uart_buf, uart_buf_len, 100);
CellVoltage1 =0;
CellVoltage[2] = AFE_ReadCellVoltage(2);
CellVoltage[3] = AFE_ReadCellVoltage(3);
CellVoltage[4] = AFE_ReadCellVoltage(4);
CellVoltage[5] = AFE_ReadCellVoltage(5);
CellVoltage[6] = AFE_ReadCellVoltage(6);
CellVoltage[7] = AFE_ReadCellVoltage(7);
CellVoltage[8] = AFE_ReadCellVoltage(8);
CellVoltage[9] = AFE_ReadCellVoltage(9);
CellVoltage[10] = AFE_ReadCellVoltage(10);
//Stack_Voltage = AFE_ReadStackVoltage();
PACK_Voltage = AFE_ReadPackVoltage();
LD_Voltage = AFE_ReadLDVoltage();
PACK_Current = AFE_ReadCurrent();
Temperature[0] = AFE_ReadTemperature(2);
FET_Temperature = AFE_ReadTemperature(1);
AlarmBits = AFE_ReadAlarmStatus();
//Debug code - prints the Cell1 Voltage to a terminal window
// uart_buf_len = sprintf(uart_buf, "%u \r\n", AlarmBits);
// HAL_UART_Transmit(&huart1, (uint8_t *)uart_buf, uart_buf_len, 100);
if (AlarmBits & 0x82) {
AFE_ClearScanBits();
}
if (AlarmBits & 0xC000) {
AFE_ReadSafetyStatus();
AFE_ReadPFStatus();
AFE_ClearFaults();
AFE_PFReset();
}
CellVoltage1 =0;
HAL_Delay(500);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL8;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 400000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 63;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 65535;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
void HAL_GPIO_EXTI_Callback ( uint16_t GPIO_Pin )
{
if ( GPIO_Pin == GPIO_PIN_3 ) {
HAL_GPIO_TogglePin (GPIOA, GPIO_PIN_5 );
}
else {
__NOP ();
}
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
I am awating for you replay..
thanks.