Tool/software:
Hi Sir,
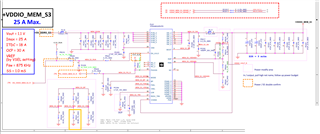
I have a Design Spec
Vin =5V, Vout=1.1V, Iout=30A, the FSEL PR231 is setting 90k9
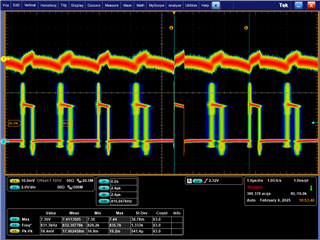
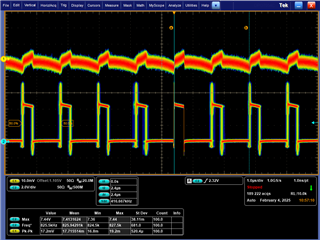
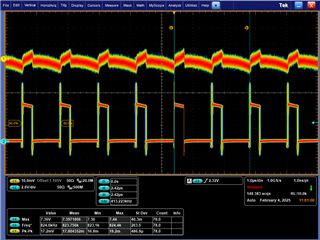
the switch frequecy is unstable at havey load, it look like sub-hamonic Osclliate ?
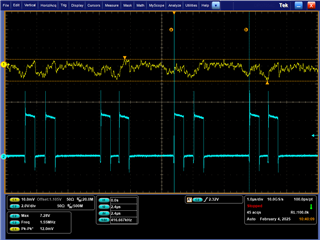
I adjust the resistance PR231 to 75k, 60k9 and 47k5 , the switch frequency is stable , but with the different jetter level.
Could you provide the formula to calculate this case. thanks.
(from up to down, 75k, 60k9, 47k5)