Other Parts Discussed in Thread: BQ79616
Tool/software:
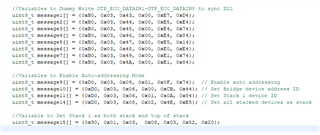
Hello! I am trying to use the BQ79600 and the BQ79616 to create a simple prototype. Our system has one stack device and one bridge device, but we are running into problems receiving the data back from the bridge device. We can see the serial communication between the bridge device and the stack device, and we can see the data being transferred, but SPI_READY never triggers back high after triggering low, so we never receive any data. I have attached an explanation document with Waveform photos and code photos. We are using the STM32 Cube IDE and the STMf042k6t7 microcontroller for our main microcontroller for the system..