Hi team,
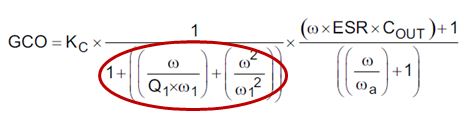
Can I get the MathCAD design tool for TPS53626? I need it for setting control loop parameters. Thank you so much.
This is what DS said : Contact your TI representative to obtain the MathCAD design tool to calculate the stability requirements in this section.