A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
how to enable two consoles in am5728 has already one console is working using uart3 i want one more console to enable. plz i need it if any one is having idea
Are you using custom board or is it a TI EVM? TI EVM has only one UART instance connected to UART port on AM5728 IDK so it won't be possible to use two UART instances simultaneously.
Can you provide more details on what is the use case here?, we will be able to give more pointed suggestions with that information.
we are using custom board and the use case is we need two consoles so that the one console is required for reading input in to the board and one more console is for sending data output.
You can write two custom UART_stdioinit APIs one for input and one for output which creates two global UART_handles (one for each instance). You can take reference of UART_stdioinit.c at PDK\packages\ti\drv\uart\src\UART_stdio.c. This will initialize two UART instances and then you have to modify the UART_printf and UART_scanf to use these two handles for UART input and output.
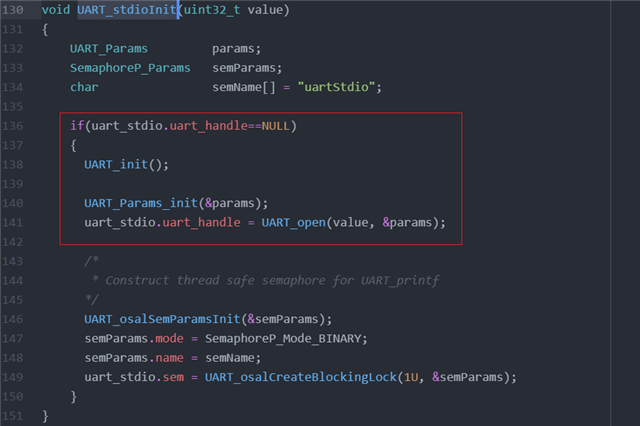
Please try the following steps: 1) Refer to UART_stdioInit API in PDK\packages\ti\drv\uart\src\UART_stdio.c. UART_stdioInit basically initializes the UART instance to use for console operations and also initializes UART_Stdio_Object. You need to create two UART_Stdio_Object 1) uart_stdio_read, 2)uart_stdio_write
2) Write two more API's similar to UART_stdioInit - (UART_stdioInitRead and UART_stdioInitWrite) to initialize uart_stdio_read and uart_stdio_write.
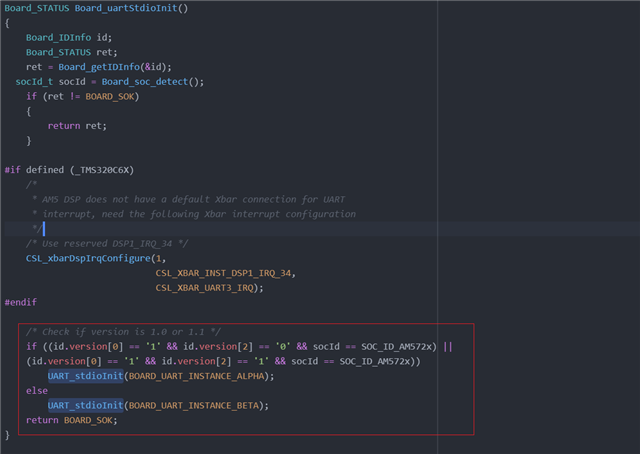
3) Modify Board_uartStdioInit in PDK\ti\board\src\idkAM572x\idkAM572x_lld_init.c to call UART_stdioInitRead and UART_stdioInitWrite with respective instances instead of UART_stdioInit.
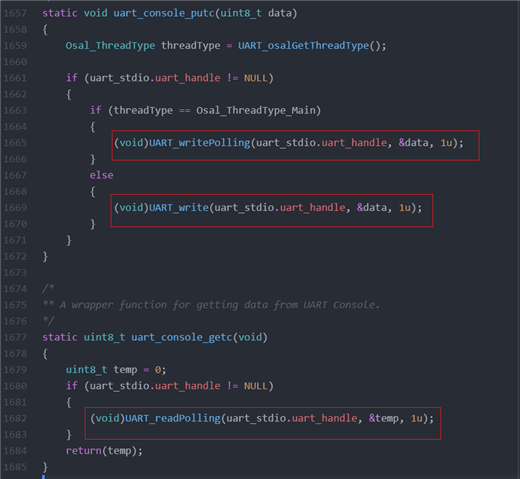
4) Modify uart_console_getc and uart_console_putc in PDK\packages\ti\drv\uart\src\UART_stdio.c to pass respective read and write handles to UART_write and UART_readPolling.