Other Parts Discussed in Thread: TDA4VM
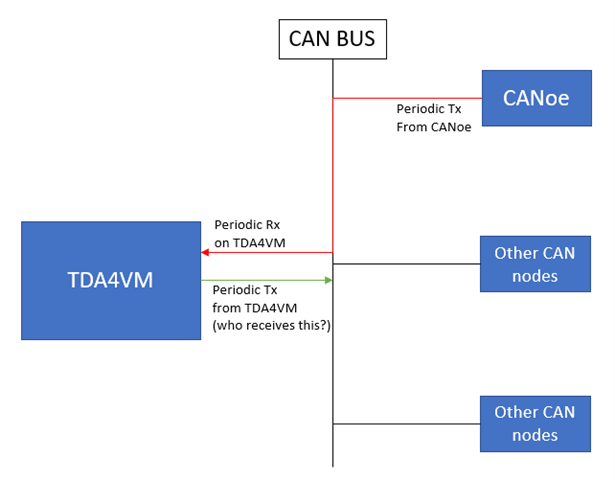
CAN bus cannot be recovered after bus off happened.
After recovered by Cansm, Can_wirte can not executed due to the function "Can_writeGetFreeMsgObj" always returns CAN_BUSY, as the condition canTxStatus == 1,

In normal case, the canTxStatus is cleared at the TxConfirm function, but this didn't be executed during Bus off.
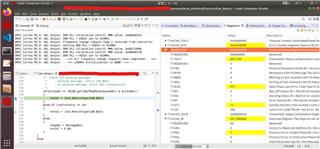
we fix the issue by modify the Can_mcanProcessISR,like below

is that a bug?please check it and reply, thanks.