Hi,
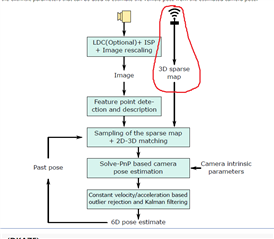
in visual localization application, i notice that 3d sparse map point clouds are provided with descriptors in files named 'map_feat.bin' and 'map_desc.bin', in which comprises coordinates in (x,y,z) and feature descriptors in 64-elements. i was wondering how can we generate this kind of maps by ourselves? Point clouds are fine, but to generate each point with feature descriptors is beyond my comprehension. Could you give me some clue about it?