Other Parts Discussed in Thread: MATHLIB
Hello,
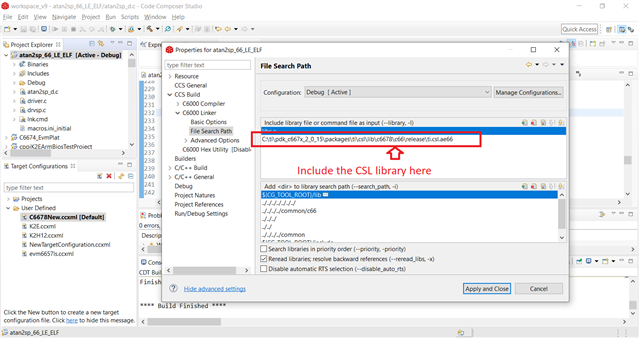
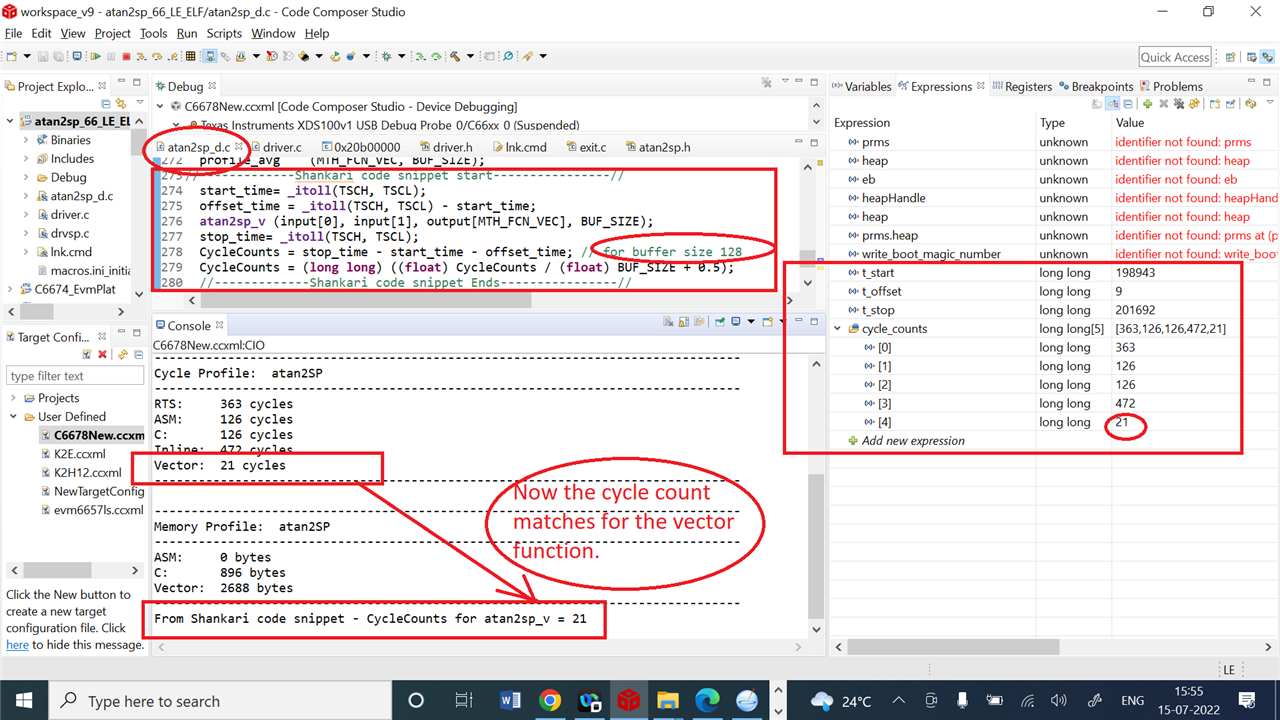
I am trying to get the time it takes for benchmarking DSP C66xx in CC9.3.
I have attached the screenshot from my simulation, it shows 21 cycles for vector cycles among other things... I am trying to get a confirmation of this comparing to that of DSP benchmarking document by TI (SPRAC13). Has anyone tried to do the benchmarking for Arctan2? Thanks.
Regards,
Ali