


I have 2 tasks setup in my application with the same priority level 1. Timer, SWI, and Task support are enabled. I attached the configuration file as part of the post.
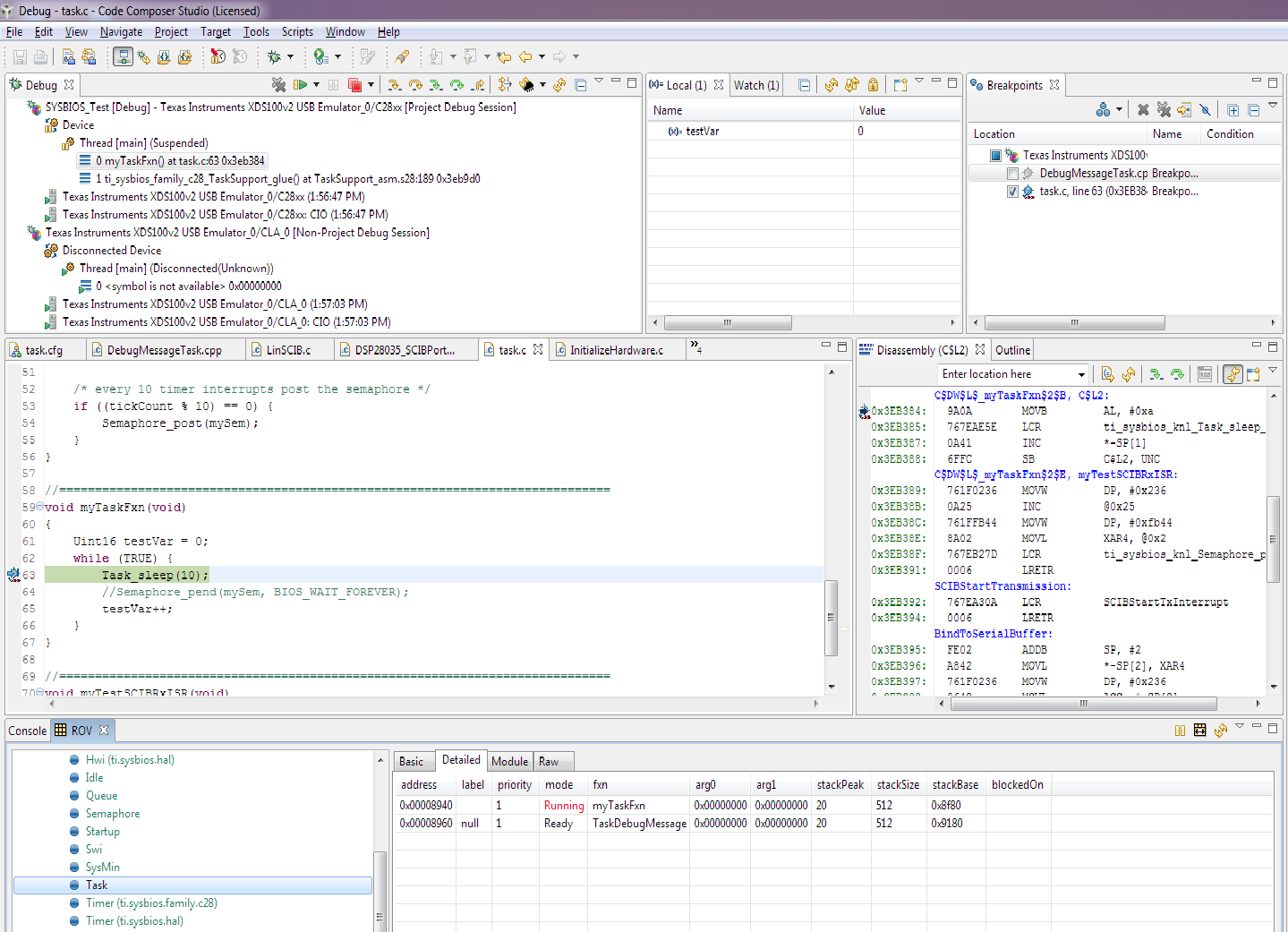
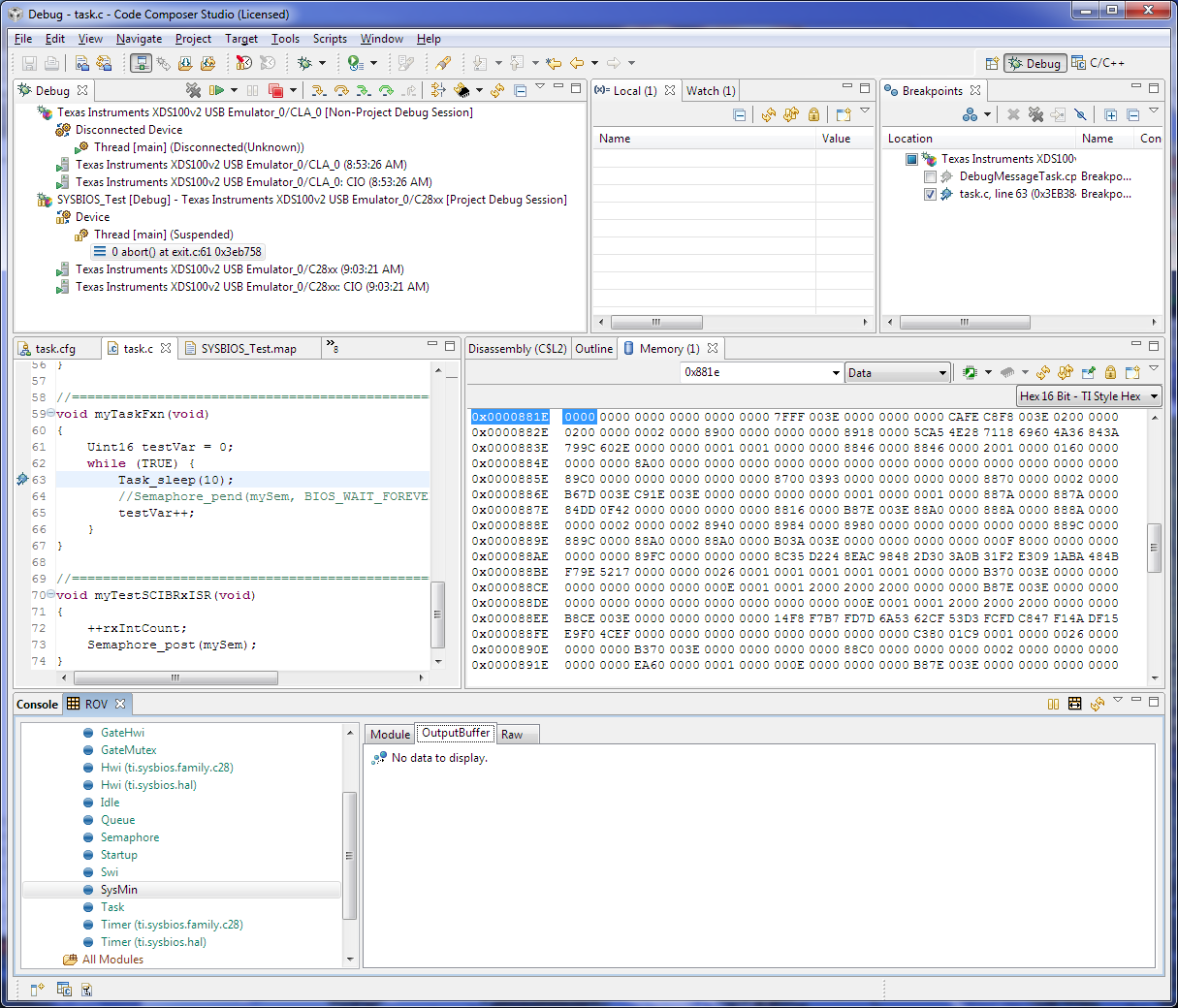
I am trying to use the Task_sleep() call in my project and my application seems to be aborting on the call (ie. task thread is in abort() function). The message in the debugger reads:
0 abort() at exit.c:61 0x3eb75a
I have the default clock module setup properly and is incrementing in ticks if I don't have any Task_sleep() calls.
Do you have any suggestions / solution to this issue?
Thank you.
PROJECT SETUP
----------------------
SYS/BIOS 6.30.3.46
CCS 4.2.3.00004
XDCToolsv 3.20.8.88
Microprocessor DSP28035

{kind=link}
{kind=link}