


Hi,
For implementing "early boot late attach" to our custom board for VSDK304, we need to enable i2c2 ~ i2c5 in uboot to control our devices. They are disabled by default. We do these:
add pinmux define
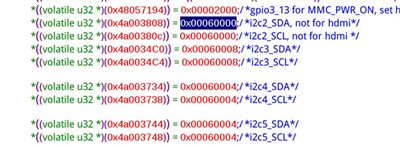
modify .dtsi

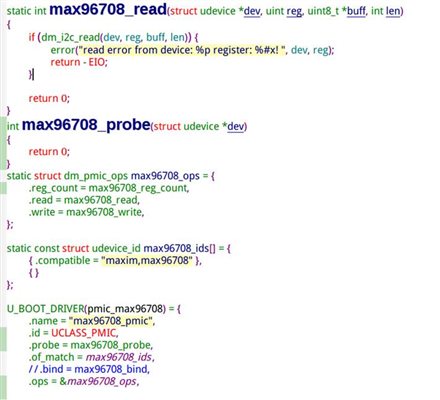
add a sensor device
but still get err in uboot
=> i2c dev 1
Setting bus to 1
Failure changing bus number (-19)
How to solve it? Thanks.
