


Part Number: TDA4VM
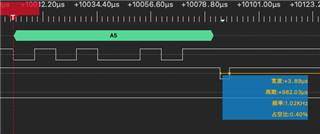
Hi,we are testing uart driver and find out the UART Interrupt function: UART_v1_hwiIntFxn() will take more than 3.8us to process,so when we have amount of data coming in(eg:460800bps,9KB/sec of data), the system will not be real time, and this will make our application unuseable, we want to know why the uart ISR take so much time, and is there any solution for this?
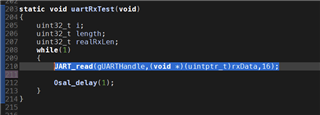
alse we want to know how to enable uart rx fifo, we use UART_read(gUARTHandle,(void *)(uintptr_t)rxData,16); to read multiple bytes but found out it still enter ISR every single byte.
the second Chanel indicate how long it take to process the ISR using gpio write.
our test case
Regards,
JasonZhang
