Hi Team,
Can you please help with the inquiry below?
Referring to SPRUHZ6L–October 2014–Revised August 2019 page 9577 the customer believe that:
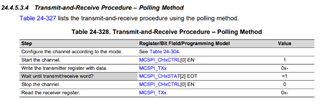
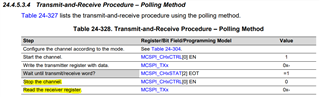
1) "stop the channel should be the last step - after all receive has been done
2) The register for the line "Read the received register" should be MCSPI_RXx
The customer based this on Table 24-325 (Receive-only procedure - polling method)
Would Please confirm if the customer's interpretation is correct?
Thank you in advance.
Regards,
Marvin