we run the mcan example demo in pdk package in SBL way and it runs well in mcu1_0.
but after we move the demo into vision_app directory and try to run in SPL way,interrupt is triggered unexpectedly in mcu1_0.
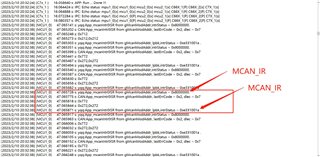
when Tx finish sending data , the interrupt is still triggered continuously in mcu1_0 and the value of MCAN_IR can't be cleared .
following is the issue log: