


Hi team,
Here's an issue from the customer may need your help:
Debug CAN driver in mcu3_0 where both the MCU domain CAN and the main domain CAN are used:
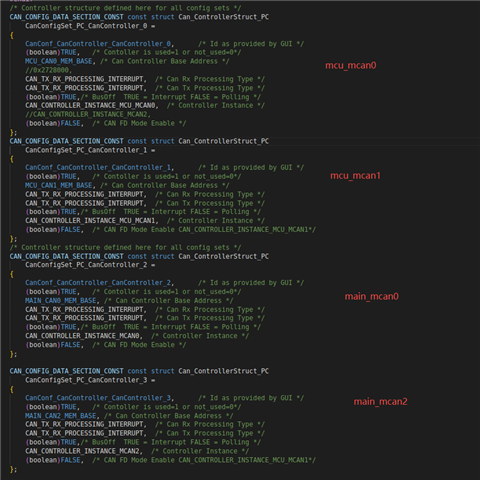
In the initialization list:
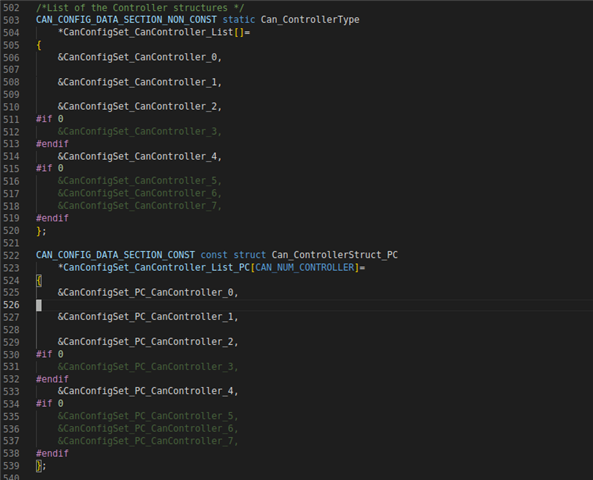
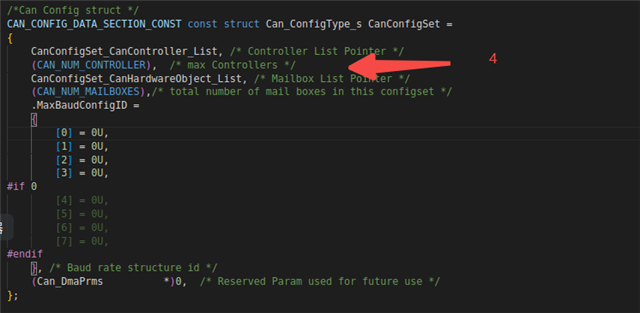
When debugging with canoe, only the two can in front of the initialization list can be sent. Only the first two can can be used, regardless of the initialization sequence, whether MCU_can or main_can. It also indicates that there is no problem with the hardware configuration of CAN. But this error will still occur. (On mcu3_0, the MCU_can interrupt is already mapped)
The customer would like to know the possible cause of this issue. Thanks.
Best Regards,
Cherry

