Dear TI:
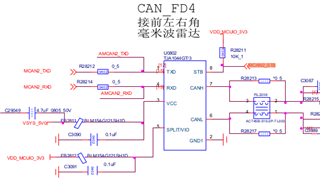
I use MCAN2 on mcu2-1; I have configured pinmux for TX, RX, and STB pins, and measured that the STB pin has been pulled down; However, the upper computer did not receive the message from MCAN2 and did not detect the baud rate; There is no waveform when measuring CANL and CANH using an oscilloscope; Could you please help me check where the problem is?
thanks
#include <can.h>
/* ========================================================================== */
/* Macros */
/* ========================================================================== */
#define APP_ENABLE_UART_PRINT (1U)
#define APP_MCAN_STD_ID_FILT_START_ADDR (0U)
#define APP_MCAN_STD_ID_FILTER_NUM (1U)
#define APP_MCAN_EXT_ID_FILT_START_ADDR (48U)
#define APP_MCAN_EXT_ID_FILTER_NUM (1U)
#define APP_MCAN_TX_EVENT_START_ADDR (100U)
#define APP_MCAN_TX_EVENT_SIZE (5U)
#define APP_MCAN_TX_BUFF_START_ADDR (148U)
#define APP_MCAN_TX_BUFF_SIZE (5U)
#define APP_MCAN_TX_FIFO_SIZE (5U)
#define APP_MCAN_FIFO_0_START_ADDR (548U)
#define APP_MCAN_FIFO_0_NUM (5U)
#define APP_MCAN_FIFO_1_START_ADDR (748U)
#define APP_MCAN_FIFO_1_NUM (5U)
#define APP_MCAN_RX_BUFF_START_ADDR (948U)
#define APP_MCAN_EXT_ID_AND_MASK (0x1FFFFFFFU)
#if defined (SOC_J721E) || defined (SOC_J7200) || defined (SOC_J721S2) || defined (SOC_J784S4)
#define APP_MCU_MCAN_0_INT0 (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_MCAN0_MCANSS_MCAN_LVL_INT_0)
#define APP_MCU_MCAN_0_INT1 (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_MCAN0_MCANSS_MCAN_LVL_INT_1)
#define APP_MCU_MCAN_0_TS_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_MCAN0_MCANSS_EXT_TS_ROLLOVER_LVL_INT_0)
#define APP_MCU_MCAN_1_INT0 (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_MCAN1_MCANSS_MCAN_LVL_INT_0)
#define APP_MCU_MCAN_1_INT1 (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_MCAN1_MCANSS_MCAN_LVL_INT_1)
#define APP_MCU_MCAN_1_TS_INT (CSLR_MCU_R5FSS0_CORE0_INTR_MCU_MCAN1_MCANSS_EXT_TS_ROLLOVER_LVL_INT_0)
#endif
#define APP_MCAN_0_INT0 (CSLR_R5FSS0_CORE0_INTR_MCAN0_MCANSS_MCAN_LVL_INT_0)
#define APP_MCAN_0_INT1 (CSLR_R5FSS0_CORE0_INTR_MCAN0_MCANSS_MCAN_LVL_INT_1)
#define APP_MCAN_0_TS_INT (CSLR_R5FSS0_CORE0_INTR_MCAN0_MCANSS_EXT_TS_ROLLOVER_LVL_INT_0)
#define APP_MCAN_1_INT0 (CSLR_R5FSS0_CORE0_INTR_MCAN1_MCANSS_MCAN_LVL_INT_0)
#define APP_MCAN_1_INT1 (CSLR_R5FSS0_CORE0_INTR_MCAN1_MCANSS_MCAN_LVL_INT_1)
#define APP_MCAN_1_TS_INT (CSLR_R5FSS0_CORE0_INTR_MCAN1_MCANSS_EXT_TS_ROLLOVER_LVL_INT_0)
/* Macros for MAIN MCAN Instances to use for testing */
#define APP_MAIN_MCAN_DEF_INST0_BASE_ADDRESS (CSL_MCAN4_MSGMEM_RAM_BASE)
#if defined (SOC_J721E) || defined (SOC_J7200)
#define APP_MAIN_MCAN_DEF_INST1_BASE_ADDRESS (CSL_MCAN5_MSGMEM_RAM_BASE)
#elif defined (SOC_J721S2) || defined (SOC_J784S4)
#define APP_MAIN_MCAN_DEF_INST1_BASE_ADDRESS (CSL_MCAN16_MSGMEM_RAM_BASE)
#endif
#define APP_MAIN_MCAN_DEF_INST0_INT0 (CSLR_R5FSS1_CORE1_INTR_MCAN2_MCANSS_MCAN_LVL_INT_0)
#define APP_MAIN_MCAN_DEF_INST0_INT1 (CSLR_R5FSS1_CORE1_INTR_MCAN2_MCANSS_MCAN_LVL_INT_1)
#define APP_MAIN_MCAN_DEF_INST0_TS_INT (CSLR_R5FSS1_CORE1_INTR_MCAN2_MCANSS_EXT_TS_ROLLOVER_LVL_INT_0)
#define APP_MAIN_MCAN_DEF_INST1_INT0 (CSLR_R5FSS1_CORE1_INTR_MCAN16_MCANSS_MCAN_LVL_INT_0)
#define APP_MAIN_MCAN_DEF_INST1_INT1 (CSLR_R5FSS1_CORE1_INTR_MCAN16_MCANSS_MCAN_LVL_INT_1)
#define APP_MAIN_MCAN_DEF_INST1_TS_INT (CSLR_R5FSS1_CORE1_INTR_MCAN16_MCANSS_EXT_TS_ROLLOVER_LVL_INT_0)
/* Print buffer character limit for prints- UART or CCS Console */
#define APP_PRINT_BUFFER_SIZE (4000U)
//#define MCU_MCAN1_STB_PIN (0x2)
#define MCAN0_STB_PIN (0x01) /*CAN1*/
#define MCU_MCAN1_STB_PIN (0x19) /*CAN2*/
#define MCAN1_STB_PIN (0x16) /*CAN3*/
#define MCAN2_STB_PIN (0x17) /*CAN4*/
#define MCAN13_STB_PIN (0x22) /*CAN5*/
#define MCAN14_STB_PIN (0x08) /*CAN6*/
#define MCAN15_STB_PIN (0x24) /*CAN7*/
#define MCAN16_STB_PIN (0x37) /*CAN8*/
//#define MCU_MCAN0_ENABLE_PIN (0x0)
#define MCU_MCAN0_ENABLE_PIN (0x11)
#define MCU_MCAN0_STBZ_PIN (0x45)
/* ========================================================================== */
/* Global Variables */
/* ========================================================================== */
uint32_t gMcanAppdataSize[16] =
{0, 1, 2, 3, 4, 5, 6, 7, 8, 12, 16, 20, 24, 32, 48, 64};
volatile uint32_t gMcanIsrIntr0Flag = 1U, gMcanIsrIntr0Flag_lpbk = 1U;
volatile uint32_t gMcanIsrIntr1Flag = 1U, gMcanIsrIntr1Flag_lpbk = 1U;
uint32_t gMcanModAddr, gMcanModAddr_lpbk;
/* GPIO Driver board specific pin configuration structure */
GPIO_PinConfig gpioPinConfigs[] = {
GPIO_DEVICE_CONFIG(0, 17) | GPIO_CFG_IN_INT_BOTH_EDGES | GPIO_CFG_OUT_LOW ,
};
GPIO_CallbackFxn gpioCallbackFunctions[] =
{
NULL,
};
/* GPIO Driver configuration structure */
GPIO_v0_Config GPIO_v0_config = {
gpioPinConfigs,
gpioCallbackFunctions,
sizeof(gpioPinConfigs) / sizeof(GPIO_PinConfig),
sizeof(gpioCallbackFunctions) / sizeof(GPIO_CallbackFxn),
0x8U
};
/*GPIO expander Configuration array */
Board_IoExpCfg_t ioExpCfg[]=
{
{
.i2cInst = BOARD_I2C_IOEXP_SOM_INSTANCE,
.socDomain = BOARD_SOC_DOMAIN_MAIN,
.slaveAddr = BOARD_I2C_IOEXP_SOM_ADDR,
.enableIntr = false,
.ioExpType = ONE_PORT_IOEXP,
.portNum = PORTNUM_0,
.pinNum = PIN_NUM_7,
.signalLevel = GPIO_SIGNAL_LEVEL_LOW,
},
/*Set CANUART_MUX1_SEL0 to LEVEL_HIGH */
{
.i2cInst = BOARD_I2C_IOEXP_SOM_INSTANCE,
.socDomain = BOARD_SOC_DOMAIN_MAIN,
.slaveAddr = BOARD_I2C_IOEXP_SOM_ADDR,
.enableIntr = false,
.ioExpType = ONE_PORT_IOEXP,
.portNum = PORTNUM_0,
.pinNum = PIN_NUM_1,
.signalLevel = GPIO_SIGNAL_LEVEL_HIGH,
},
/*Set CANUART_MUX2_SEL0 to LEVEL_HIGH */
{
.i2cInst = BOARD_I2C_IOEXP_SOM_INSTANCE,
.socDomain = BOARD_SOC_DOMAIN_MAIN,
.slaveAddr = BOARD_I2C_IOEXP_SOM_ADDR,
.enableIntr = false,
.ioExpType = ONE_PORT_IOEXP,
.portNum = PORTNUM_0,
.pinNum = PIN_NUM_2,
.signalLevel = GPIO_SIGNAL_LEVEL_HIGH,
},
/*Set CANUART_MUX_SEL1 to LEVEL_HIGH*/
{
.i2cInst = BOARD_I2C_IOEXP_SOM_INSTANCE,
.socDomain = BOARD_SOC_DOMAIN_MAIN,
.slaveAddr = BOARD_I2C_IOEXP_SOM_ADDR,
.enableIntr = false,
.ioExpType = ONE_PORT_IOEXP,
.portNum = PORTNUM_0,
.pinNum = PIN_NUM_3,
.signalLevel = GPIO_SIGNAL_LEVEL_HIGH,
},
};
#define CAN_RX_TSK_STACK (32U * 1024U)
#define CAN_TX_TSK_STACK (32U * 1024U)
static uint8_t gCanRxTskStack[CAN_RX_TSK_STACK]
__attribute__ ((aligned(8192)));
static uint8_t gCanTxTskStack[CAN_TX_TSK_STACK]
__attribute__ ((aligned(8192)));
static uint8_t gTskStackFunc[64*1024]
__attribute__ ((section(".bss:taskStackSection")))
__attribute__ ((aligned(8192)))
;
/* ========================================================================== */
/* Internal Function Declarations */
/* ========================================================================== */
/**
* \brief This function will configure MCAN module
*
* \param mcanInstAddr MCAN Instance address
* enableInternalLpbk Flag to enable/disable Internal loopback
*
* \retval status configuration status.
*/
static int32_t App_mcanConfig(uint32_t mcanInstAddr, bool enableInternalLpbk);
/**
* \brief This function will configure X-BAR for MCAN interrupts
*
* \param MCAN Instance address
*
* \retval status configuration status.
*/
static int32_t App_mcanRegisterIsr(uint32_t mcanInstAddr);
/**
* \brief This is Interrupt Service Routine for MCAN interrupt 0.
*
* \param none.
*
* \retval none.
*/
static void App_mcanIntr0ISR(uintptr_t arg);
/**
* \brief This is Interrupt Service Routine for MCAN interrupt 1.
*
* \param none.
*
* \retval none.
*/
static void App_mcanIntr1ISR(uintptr_t arg);
/**
* \brief This is Interrupt Service Routine for MCAN TimeStamp interrupt.
*
* \param none.
*
* \retval none.
*/
static void App_mcanTSIntrISR(uintptr_t arg);
/**
* \brief This API will MCAN Rx Msg.
*
* \param rxMsg received message object.
*
* \retval none.
*/
static void App_mcanPrintRxMsg(const MCAN_RxBufElement *rxMsg);
/**
* \brief This API will MCAN Tx Msg.
*
* \param txMsg message object to be transmitted.
*
* \retval none.
*/
static void App_mcanPrintTxMsg(const MCAN_TxBufElement *txMsg);
/**
* \brief This API will load the register from ECC memory bank.
*
* \param txMsg message object to be transmitted.
*
* \return None.
*/
static void APP_mcanTxTest(MCAN_TxBufElement *txMsg);
/**
* \brief This API will load the register from ECC memory bank.
*
* \param txMsg message object to be transmitted
* (Needed for Message validation).
*
* \return None.
*/
//static void APP_mcanRxTest(const MCAN_TxBufElement *txMsg);
/**
* \brief This function will transmit fixed pattern and expects to receive
* the same
*
* \param txMsg message object to be transmitted.
*
* \return None.
*/
static void APP_mcanLpbkTest(MCAN_TxBufElement *txMsg);
/**
* \brief This function will transmit fixed pattern from one CAN instance
* and recieve the same pattern at another CAN instance, given that both
* are connected externally.
*
*
* \param txMsg message object to be transmitted.
*
* \return None.
*/
static void APP_mcanExtLpbkTest(MCAN_TxBufElement *txMsg);
/**
* \brief This API will print on UART/CCS Console.
*
* \param pcString string to be printed.
*
* \return None.
*/
void App_ConsolePrintf(const char *pcString, ...);
/**
* \brief This API will get a number from UART/CCS Console.
*
* \param num get the user input.
*
* \return None.
*/
static int32_t App_mcanRegisterInterrupt(uint32_t intNum, void f(uintptr_t));
#if defined (BUILD_MCU1_0)
static int32_t App_mcanCfgIrqRouterMain2Mcu(uint32_t devId, uint32_t offset, uint32_t intNum);
#endif
static void App_ConsoleGetNum(uint32_t *num);
static void APP_mcanRxTest(void);
void padConfig_prcmEnable()
{
GPIO_v0_HwAttrs gpio_cfg;
GPIO_socGetInitCfg(0, &gpio_cfg);
gpio_cfg.baseAddr = CSL_WKUP_GPIO0_BASE;
gpio_cfg.intCfg[17].eventId = 0;
gpio_cfg.intCfg[17].intcMuxNum = INVALID_INTC_MUX_NUM;
gpio_cfg.intCfg[17].intcMuxInEvent = 0;
gpio_cfg.intCfg[17].intcMuxOutEvent = 0;
GPIO_socSetInitCfg(0, &gpio_cfg);
GPIO_init();
GPIO_enableInt(0);
/* GPIO initialization */
/* Enable CAN transceivers by setting the STB pins */
/* Enable the TCAN on GESI board.
* Main Domain MCAN instances 4,5,6,7,9,11.
*/
GPIO_write(0, GPIO_PIN_LOW);
GPIOSetDirMode_v0(CSL_WKUP_GPIO0_BASE, MCAN2_STB_PIN, GPIO_DIRECTION_OUTPUT);
GPIOPinWrite_v0(CSL_WKUP_GPIO0_BASE, MCAN2_STB_PIN, GPIO_PIN_LOW);
}
static int32_t App_mcanRegisterInterrupt(uint32_t intNum, void f(uintptr_t))
{
int32_t configStatus = STW_SOK;
OsalRegisterIntrParams_t intrPrms;
OsalInterruptRetCode_e osalRetVal;
HwiP_Handle hwiHandle = NULL;
/* Enable CPU Interrupts and register ISR - MCAN0 Intr0 */
Osal_RegisterInterrupt_initParams(&intrPrms);
/* Populate the interrupt parameters */
intrPrms.corepacConfig.arg = (uintptr_t) NULL;
intrPrms.corepacConfig.isrRoutine = f;
intrPrms.corepacConfig.priority = 0U;
intrPrms.corepacConfig.corepacEventNum = 0U;
intrPrms.corepacConfig.intVecNum = intNum;
/* Register interrupts */
osalRetVal = Osal_RegisterInterrupt(&intrPrms, &hwiHandle);
if(OSAL_INT_SUCCESS != osalRetVal)
{
configStatus = CSL_EFAIL;
}
return configStatus;
}
static int32_t App_mcanCfgIrqRouterMain2Mcu(uint32_t devId, uint32_t offset, uint32_t intNum)
{
int32_t retVal;
struct tisci_msg_rm_irq_set_req rmIrqReq;
struct tisci_msg_rm_irq_set_resp rmIrqResp;
rmIrqReq.valid_params = TISCI_MSG_VALUE_RM_DST_ID_VALID;
rmIrqReq.valid_params |= TISCI_MSG_VALUE_RM_DST_HOST_IRQ_VALID;
rmIrqReq.src_id = devId;
rmIrqReq.global_event = 0U;
rmIrqReq.src_index = offset;
rmIrqReq.dst_id = TISCI_DEV_MCU_R5FSS0_CORE0;
rmIrqReq.dst_host_irq = intNum;
rmIrqReq.ia_id = 0U;
rmIrqReq.vint = 0U;
rmIrqReq.vint_status_bit_index = 0U;
rmIrqReq.secondary_host = TISCI_MSG_VALUE_RM_UNUSED_SECONDARY_HOST;
retVal = Sciclient_rmIrqSet(&rmIrqReq, &rmIrqResp, SCICLIENT_SERVICE_WAIT_FOREVER);
if(CSL_PASS != retVal)
{
appLogPrintf("Error in SciClient Interrupt Params Configuration!!!");
appLogPrintf("offset: %d \n", offset);
}
else
{
appLogPrintf("SciClient Interrupt Params Configuration passed for offset: %d \n", offset);
}
return retVal;
}
static int32_t App_mcanRegisterIsr(uint32_t mcanInstAddr)
{
int32_t configStatus = STW_SOK;
#if 0
/* Running Code from Mcu R5 */
/* MCU MCAN Inst 0 */
configStatus = App_mcanRegisterInterrupt(APP_MCU_MCAN_0_INT0, &App_mcanIntr0ISR);
configStatus += App_mcanRegisterInterrupt(APP_MCU_MCAN_0_INT1, &App_mcanIntr1ISR);
configStatus += App_mcanRegisterInterrupt(APP_MCU_MCAN_0_TS_INT, &App_mcanTSIntrISR);
/* MCU MCAN Inst 1 */
configStatus += App_mcanRegisterInterrupt(APP_MCU_MCAN_1_INT0, &App_mcanIntr0ISR);
configStatus += App_mcanRegisterInterrupt(APP_MCU_MCAN_1_INT1, &App_mcanIntr1ISR);
configStatus += App_mcanRegisterInterrupt(APP_MCU_MCAN_1_TS_INT, &App_mcanTSIntrISR);
#else
/* Running Code from Main R5 */
/* Main MCAN Default Tx Inst */
configStatus = App_mcanRegisterInterrupt(APP_MAIN_MCAN_DEF_INST0_INT0, &App_mcanIntr0ISR);
configStatus += App_mcanRegisterInterrupt(APP_MAIN_MCAN_DEF_INST0_INT1, &App_mcanIntr1ISR);
configStatus += App_mcanRegisterInterrupt(APP_MAIN_MCAN_DEF_INST0_TS_INT, &App_mcanTSIntrISR);
/* Main MCAN Default Rx Inst*/
configStatus = App_mcanRegisterInterrupt(APP_MAIN_MCAN_DEF_INST1_INT0, &App_mcanIntr0ISR);
configStatus += App_mcanRegisterInterrupt(APP_MAIN_MCAN_DEF_INST1_INT1, &App_mcanIntr1ISR);
configStatus += App_mcanRegisterInterrupt(APP_MAIN_MCAN_DEF_INST1_TS_INT, &App_mcanTSIntrISR);
#endif
if(STW_SOK != configStatus)
{
appLogPrintf("CrossBar/Interrupt Configuration failed.\n");
}
else
{
appLogPrintf("CrossBar/Interrupt Configuration done.\n");
}
return configStatus;
}
static int32_t App_mcanConfig(uint32_t mcanInstAddr, bool enableInternalLpbk)
{
uint32_t fdoe;
int32_t configStatus = CSL_PASS;
MCAN_RevisionId revId;
MCAN_InitParams initParams;
MCAN_ConfigParams configParams;
MCAN_MsgRAMConfigParams msgRAMConfigParams;
MCAN_StdMsgIDFilterElement stdFiltelem;
MCAN_BitTimingParams bitTimes;
/* Initialize MCAN Init params */
initParams.fdMode = 0x1U;
initParams.brsEnable = 0x1U;
initParams.txpEnable = 0x0U;
initParams.efbi = 0x0U;
initParams.pxhddisable = 0x0U;
/* To enable automatic retransmission of the packet,
* program initParams.darEnable to "0" */
initParams.darEnable = 0x1U;
initParams.wkupReqEnable = 0x1U;
initParams.autoWkupEnable = 0x1U;
initParams.emulationEnable = 0x1U;
initParams.emulationFAck = 0x0U;
initParams.clkStopFAck = 0x0U;
initParams.wdcPreload = 0xFFU;
initParams.tdcEnable = 0x1U;
initParams.tdcConfig.tdcf = 0xAU;
initParams.tdcConfig.tdco = 0x6U;
/* Initialize MCAN Config params */
configParams.monEnable = 0x0U;
configParams.asmEnable = 0x0U;
configParams.tsPrescalar = 0xFU;
configParams.tsSelect = 0x0U;
configParams.timeoutSelect = MCAN_TIMEOUT_SELECT_CONT;
configParams.timeoutPreload = 0xFFFFU;
configParams.timeoutCntEnable = 0x0U;
configParams.filterConfig.rrfs = 0x1U;
configParams.filterConfig.rrfe = 0x1U;
configParams.filterConfig.anfe = 0x1U;
configParams.filterConfig.anfs = 0x1U;
/* Initialize Message RAM Sections Configuration Parameters */
msgRAMConfigParams.flssa = APP_MCAN_STD_ID_FILT_START_ADDR;
msgRAMConfigParams.lss = APP_MCAN_STD_ID_FILTER_NUM;
msgRAMConfigParams.flesa = APP_MCAN_EXT_ID_FILT_START_ADDR;
msgRAMConfigParams.lse = APP_MCAN_EXT_ID_FILTER_NUM;
msgRAMConfigParams.txStartAddr = APP_MCAN_TX_BUFF_START_ADDR;
msgRAMConfigParams.txBufNum = APP_MCAN_TX_BUFF_SIZE;
msgRAMConfigParams.txFIFOSize = 0U;
msgRAMConfigParams.txBufMode = 0U;
msgRAMConfigParams.txBufElemSize = MCAN_ELEM_SIZE_64BYTES;
msgRAMConfigParams.txEventFIFOStartAddr = APP_MCAN_TX_EVENT_START_ADDR;
msgRAMConfigParams.txEventFIFOSize = APP_MCAN_TX_BUFF_SIZE;
msgRAMConfigParams.txEventFIFOWaterMark = 3U;
msgRAMConfigParams.rxFIFO0startAddr = APP_MCAN_FIFO_0_START_ADDR;
msgRAMConfigParams.rxFIFO0size = APP_MCAN_FIFO_0_NUM;
msgRAMConfigParams.rxFIFO0waterMark = 3U;
msgRAMConfigParams.rxFIFO0OpMode = 0U;
msgRAMConfigParams.rxFIFO1startAddr = APP_MCAN_FIFO_1_START_ADDR;
msgRAMConfigParams.rxFIFO1size = APP_MCAN_FIFO_1_NUM;
msgRAMConfigParams.rxFIFO1waterMark = 3U;
msgRAMConfigParams.rxFIFO1OpMode = 0U;
msgRAMConfigParams.rxBufStartAddr = APP_MCAN_RX_BUFF_START_ADDR;
msgRAMConfigParams.rxBufElemSize = MCAN_ELEM_SIZE_64BYTES;
msgRAMConfigParams.rxFIFO0ElemSize = MCAN_ELEM_SIZE_64BYTES;
msgRAMConfigParams.rxFIFO1ElemSize = MCAN_ELEM_SIZE_64BYTES;
/* Initialize Tx Buffer Config params */
stdFiltelem.sfid2 = 0x0U;
stdFiltelem.sfid1 = 0x4U;
stdFiltelem.sfec = 0x7U;
stdFiltelem.sft = 0x0U;
/* Initialize bit timings
* Configuring 1Mbps and 5Mbps as nominal and data bit-rate respectively */
/* Initialize bit timings
* Configuring 1Mbps and 5Mbps as nominal and data bit-rate respectively */
bitTimes.nomRatePrescalar = 0x7U;
bitTimes.nomTimeSeg1 = 0x5U;
bitTimes.nomTimeSeg2 = 0x2U;
bitTimes.nomSynchJumpWidth = 0x0U;
bitTimes.dataRatePrescalar = 0x1U;
bitTimes.dataTimeSeg1 = 0x3U;
bitTimes.dataTimeSeg2 = 0x2U;
bitTimes.dataSynchJumpWidth = 0x0U;
#if 0
/* 500Kbps and 2Mbps */
bitTimes.nomRatePrescalar = 0xFU;
bitTimes.nomTimeSeg1 = 0x6U;
bitTimes.nomTimeSeg2 = 0x1U;
bitTimes.nomSynchJumpWidth = 0x0U;
bitTimes.dataRatePrescalar = 0x1U;
bitTimes.dataTimeSeg1 = 0xEU;
bitTimes.dataTimeSeg2 = 0x3U;
bitTimes.dataSynchJumpWidth = 0x0U;
#endif
/* Get MCANSS Revision ID */
MCAN_getRevisionId(mcanInstAddr, &revId);
appLogPrintf("MCANSS Revision ID:\n");
appLogPrintf("scheme:0x%x\n", revId.scheme);
appLogPrintf("Business Unit:0x%x\n", revId.bu);
appLogPrintf("Module ID:0x%x\n", revId.modId);
appLogPrintf("RTL Revision:0x%x\n", revId.rtlRev);
appLogPrintf("Major Revision:0x%x\n", revId.major);
appLogPrintf("Custom Revision:0x%x\n", revId.custom);
appLogPrintf("Minor Revision:0x%x\n", revId.minor);
/* Enable Auto wakeup */
fdoe = MCAN_isFDOpEnable(mcanInstAddr);
if ((uint32_t)TRUE == fdoe)
{
appLogPrintf("CAN-FD operation is enabled through E-Fuse.\n");
}
else
{
appLogPrintf("CAN-FD operation is disabled through E-Fuse.\n");
}
/* wait for memory initialization to happen */
while (FALSE == MCAN_isMemInitDone(mcanInstAddr))
{}
/* Get endianess value */
appLogPrintf("Endianess Value: 0x%x\n",
MCAN_getEndianVal(mcanInstAddr));
/* Put MCAN in SW initialization mode */
MCAN_setOpMode(mcanInstAddr, MCAN_OPERATION_MODE_SW_INIT);
while (MCAN_OPERATION_MODE_SW_INIT != MCAN_getOpMode(mcanInstAddr))
{}
/* Initialize MCAN module */
MCAN_init(mcanInstAddr, &initParams);
/* Configure MCAN module */
MCAN_config(mcanInstAddr, &configParams);
/* Configure Bit timings */
MCAN_setBitTime(mcanInstAddr, &bitTimes);
/* Set Extended ID Mask */
MCAN_setExtIDAndMask(mcanInstAddr, APP_MCAN_EXT_ID_AND_MASK);
/* Configure Message RAM Sections */
MCAN_msgRAMConfig(mcanInstAddr, &msgRAMConfigParams);
/* Configure Standard ID filter element */
MCAN_addStdMsgIDFilter(mcanInstAddr, 0U, &stdFiltelem);
if (TRUE == enableInternalLpbk)
{
MCAN_lpbkModeEnable (mcanInstAddr, MCAN_LPBK_MODE_INTERNAL, TRUE);
}
/* Take MCAN out of the SW initialization mode */
MCAN_setOpMode(mcanInstAddr, MCAN_OPERATION_MODE_NORMAL);
while (MCAN_OPERATION_MODE_NORMAL != MCAN_getOpMode(mcanInstAddr))
{}
return configStatus;
}
static void App_mcanIntr0ISR(uintptr_t arg)
{
uint32_t intrStatus;
intrStatus = MCAN_getIntrStatus(gMcanModAddr);
appLogPrintf("---ISR0---------intrStatus = 0x%x------------------\n",intrStatus);
MCAN_clearIntrStatus(gMcanModAddr, intrStatus);
if (MCAN_INTR_SRC_TRANS_COMPLETE ==
(intrStatus & MCAN_INTR_SRC_TRANS_COMPLETE))
{
appLogPrintf("test ---ISR0--TX---");
gMcanIsrIntr0Flag = 0U;
}
if (MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG ==
(intrStatus & MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG))
{
appLogPrintf("test ---ISR0--RX---");
gMcanIsrIntr1Flag = 0U;
}
}
static void App_mcanIntr1ISR(uintptr_t arg)
{
uint32_t intrStatus;
intrStatus = MCAN_getIntrStatus(gMcanModAddr);
appLogPrintf("---ISR1---------intrStatus = 0x%x------------------\n",intrStatus);
MCAN_clearIntrStatus(gMcanModAddr, intrStatus);
if (MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG ==
(intrStatus & MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG))
{
gMcanIsrIntr1Flag = 0U;
}
}
static void App_mcanTSIntrISR(uintptr_t arg)
{
appLogPrintf("Time Stamp overflow happened.\n");
}
void canRxTaskFunc(void* arg0, void* arg1)
{
while(1)
{
appLogPrintf("canRxTaskFunc RUN!!!\n");
APP_mcanRxTest();
appLogWaitMsecs(100u);
}
}
void App_ConsolePrintf(const char *pcString, ...)
{
static char printBuffer[APP_PRINT_BUFFER_SIZE];
va_list arguments;
/* Start the varargs processing. */
va_start(arguments, pcString);
vsnprintf (printBuffer, sizeof(printBuffer), pcString, arguments);
#if (APP_ENABLE_UART_PRINT == 1)
UART_printf(printBuffer);
#else
printf(printBuffer);
#endif
/* End the varargs processing. */
va_end(arguments);
}
static void App_ConsoleGetNum(uint32_t *num)
{
#if (APP_ENABLE_UART_PRINT == 1)
uint32_t status;
status = UART_scanFmt("%d", num);
if (status != S_PASS)
{
App_ConsolePrintf("UART Scan failed \n");
}
#else
scanf("%d", (int32_t *)num);
#endif
}
void canTxTaskFunc(void* arg0, void* arg1)
{
static MCAN_TxBufElement txMsg;
uint32_t loopCnt = 0U;
/* Initialize message to transmit */
txMsg.id = (uint32_t)((uint32_t)(0x4U) << 18U);
txMsg.rtr = 0U;
txMsg.xtd = 0U;
txMsg.esi = 0U;
txMsg.dlc = 0x2U;
txMsg.brs = 1U;
txMsg.fdf = 1U;
txMsg.efc = 1U;
txMsg.mm = 0xAAU;
txMsg.data[0] = 20;
txMsg.data[1] = 23;
while(1)
{
appLogPrintf("canTxTaskFunc RUN!!!\n");
APP_mcanTxTest(&txMsg);
appLogWaitMsecs(100u);
}
}
static void APP_mcanTxTest(MCAN_TxBufElement *txMsg)
{
appLogPrintf("test --- APP_mcanTxTest()------\n");
int32_t testStatus = CSL_PASS;
uint32_t loopCnt = 1U;
MCAN_ProtocolStatus protStatus;
/* Enable Interrupts */
MCAN_enableIntr(gMcanModAddr, MCAN_INTR_MASK_ALL, (uint32_t)TRUE);
MCAN_enableIntr(gMcanModAddr,
MCAN_INTR_SRC_RES_ADDR_ACCESS, (uint32_t)FALSE);
/* Select Interrupt Line */
MCAN_selectIntrLine(gMcanModAddr,
MCAN_INTR_MASK_ALL,
MCAN_INTR_LINE_NUM_0);
/* Enable Interrupt Line */
MCAN_enableIntrLine(gMcanModAddr,
MCAN_INTR_LINE_NUM_0,
1U);
/* Enable Transmission interrupt */
testStatus = MCAN_txBufTransIntrEnable(gMcanModAddr,
1U,
(uint32_t)TRUE);
if (CSL_PASS != testStatus)
{
appLogPrintf("Error in enabling buffer Transmit interrupt...\n");
}
else
{
{
/* Write message to Msg RAM */
MCAN_writeMsgRam(gMcanModAddr,
MCAN_MEM_TYPE_BUF,
1U,
txMsg);
/* Add request for transmission */
testStatus = MCAN_txBufAddReq(gMcanModAddr, 1U);
if (CSL_PASS != testStatus)
{
appLogPrintf("\nError in Adding Transmission Request...\n");
}
{
appLogWaitMsecs(1U);
}
gMcanIsrIntr0Flag = 1U;
MCAN_getProtocolStatus(gMcanModAddr, &protStatus);
/* Checking for Errors */
if (((MCAN_ERR_CODE_NO_ERROR == protStatus.lastErrCode) ||
(MCAN_ERR_CODE_NO_CHANGE == protStatus.lastErrCode)) &&
((MCAN_ERR_CODE_NO_ERROR == protStatus.dlec) ||
(MCAN_ERR_CODE_NO_CHANGE == protStatus.dlec)) &&
(0U == protStatus.pxe))
{
appLogPrintf(
"Message successfully transferred with payload Bytes:%d \n",
gMcanAppdataSize[txMsg->dlc]);
App_ConsolePrintf("test------UART_printf---\n");
}
else
{
appLogPrintf(
"Error in transmission with payload Bytes:%d \n",
gMcanAppdataSize[txMsg->dlc]);
testStatus = CSL_EFAIL;
}
}
}
if (CSL_EFAIL == testStatus)
{
appLogPrintf("Tx Test FAILED...\n");
}
else
{
appLogPrintf("Tx Test PASSED...\n");
}
}
static void APP_mcanRxTest(void)
{
uint32_t loopCnt = 1U, chkCnt = 0U;
int32_t testStatus = CSL_PASS;
MCAN_RxBufElement rxMsg;
MCAN_RxNewDataStatus newDataStatus;
MCAN_ErrCntStatus errCounter;
/* Enable Interrupts */
MCAN_enableIntr(gMcanModAddr, MCAN_INTR_MASK_ALL, (uint32_t)TRUE);
MCAN_enableIntr(gMcanModAddr,
MCAN_INTR_SRC_RES_ADDR_ACCESS, (uint32_t)FALSE);
/* Select Interrupt Line */
MCAN_selectIntrLine(gMcanModAddr,
MCAN_INTR_MASK_ALL,
MCAN_INTR_LINE_NUM_1);
/* Enable Interrupt Line */
MCAN_enableIntrLine(gMcanModAddr,
MCAN_INTR_LINE_NUM_1,
1U);
for (loopCnt = 1U; loopCnt < 16U; loopCnt++)
{
while (gMcanIsrIntr1Flag)
{
// appLogPrintf("CAN waiting gMcanIsrIntr1Flag!!!\n");
appLogWaitMsecs(1U);
}
gMcanIsrIntr1Flag = 1U;
/* Checking for Errors */
MCAN_getErrCounters(gMcanModAddr, &errCounter);
if ((0U == errCounter.recErrCnt) &&
(0U == errCounter.canErrLogCnt))
{
MCAN_getNewDataStatus(gMcanModAddr, &newDataStatus);
MCAN_clearNewDataStatus(gMcanModAddr, &newDataStatus);
MCAN_readMsgRam(gMcanModAddr,
MCAN_MEM_TYPE_BUF,
0U,
0U,
&rxMsg);
}
else
{
testStatus = CSL_EFAIL;
}
}
appLogPrintf("Received last message with following details: \n");
App_mcanPrintRxMsg(&rxMsg);
if (CSL_EFAIL == testStatus)
{
appLogPrintf("Rx Test FAILED...\n");
}
else
{
appLogPrintf("Rx Test PASSED...\n");
}
}
static void App_mcanPrintRxMsg(const MCAN_RxBufElement *rxMsg)
{
uint32_t loopCnt;
appLogPrintf("Message ID: 0x%x \n", rxMsg->id);
appLogPrintf("Message Remote Transmission Request: 0x%x \n", rxMsg->rtr);
appLogPrintf(
"Message Extended Frame ID(0:11Bit ID/1:29bit ID): 0x%x \n",
rxMsg->xtd);
appLogPrintf(
"Message Error State Indicator(0:Error Active/1:Error Passive): 0x%x \n",
rxMsg->esi);
appLogPrintf("Message TimeStamp: 0x%x \n ", rxMsg->rxts);
appLogPrintf("Message Data Length Code: 0x%x\n ", rxMsg->dlc);
appLogPrintf("Message BRS: 0x%x \n", rxMsg->brs);
appLogPrintf("Message CAN FD format: 0x%x \n", rxMsg->fdf);
appLogPrintf("Message Filter Index: 0x%x \n", rxMsg->fidx);
appLogPrintf("Message Accept Non-matching Frame: 0x%x \n", rxMsg->anmf);
for (loopCnt = 0U; loopCnt < gMcanAppdataSize[rxMsg->dlc]; loopCnt++)
{
appLogPrintf("\nMessage DataByte%d \n", loopCnt);
appLogPrintf(": 0x%x \n", rxMsg->data[loopCnt]);
}
}
void can_main(void)
{
TaskP_Handle canRxTask;
TaskP_Params canRxTaskParams;
TaskP_Handle canTxTask;
TaskP_Params canTxTaskParams;
int32_t configStatus = CSL_PASS;
/* Used to test the selection of different CAN */
uint32_t mcan_num;
appLogWaitMsecs(20 * 1000u);
appLogPrintf("test-----CAN--Func TASK -------\n");
/*Do Pad Config for UART and MCAN*/
padConfig_prcmEnable();
mcan_num = 4;
appLogPrintf("test ---- now run CAN %d\n",mcan_num);
switch (mcan_num)
{
case 0:
gMcanModAddr = CSL_MCU_MCAN0_MSGMEM_RAM_BASE;
break;
case 1:
gMcanModAddr = CSL_MCAN0_MSGMEM_RAM_BASE;
break;
case 2:
gMcanModAddr = CSL_MCU_MCAN1_MSGMEM_RAM_BASE;
break;
case 3:
gMcanModAddr = CSL_MCAN1_MSGMEM_RAM_BASE;
break;
case 4:
gMcanModAddr = CSL_MCAN2_MSGMEM_RAM_BASE;
break;
case 5:
gMcanModAddr = CSL_MCAN13_MSGMEM_RAM_BASE;
break;
case 6:
gMcanModAddr = CSL_MCAN14_MSGMEM_RAM_BASE;
break;
case 7:
gMcanModAddr = CSL_MCAN15_MSGMEM_RAM_BASE;
break;
case 8:
gMcanModAddr = CSL_MCAN16_MSGMEM_RAM_BASE;
break;
default:
break;
}
configStatus = App_mcanRegisterIsr(gMcanModAddr);
App_mcanConfig(gMcanModAddr,FALSE);
TaskP_Params_init(&canRxTaskParams);
canRxTaskParams.priority = 2;
canRxTaskParams.stack = gCanRxTskStack;
canRxTaskParams.stacksize = sizeof (gCanRxTskStack);
canRxTask = TaskP_create(&canRxTaskFunc, &canRxTaskParams);
// if(NULL == canRxTask)
// {
// OS_stop();
// }
TaskP_Params_init(&canTxTaskParams);
canTxTaskParams.priority = 2;
canTxTaskParams.stack = gCanTxTskStack;
canTxTaskParams.stacksize = sizeof (gCanTxTskStack);
canTxTask = TaskP_create(&canTxTaskFunc, &canTxTaskParams);
// if(NULL == canTxTask)
// {
// OS_stop();
// }
while(1)
{
appLogWaitMsecs(100u);
}
}
/**
* Note: This file was auto-generated by TI PinMux on 10/24/2021.
*
* \file J721S2_pinmux.h
*
* \brief This file contains pad configure register offsets and bit-field
* value macros for different configurations,
*
* BIT[21] TXDISABLE disable the pin's output driver
* BIT[18] RXACTIVE enable the pin's input buffer (typically kept enabled)
* BIT[17] PULLTYPESEL set the iternal resistor pull direction high or low (if enabled)
* BIT[16] PULLUDEN internal resistor disable (0 = enabled / 1 = disabled)
* BIT[3:0] MUXMODE select the desired function on the given pin
*
* \copyright Copyright (CU) 2021 Texas Instruments Incorporated -
* http://www.ti.com/
*/
#ifndef _J721S2_PIN_MUX_H_
#define _J721S2_PIN_MUX_H_
/* ========================================================================== */
/* Include Files */
/* ========================================================================== */
#include "ti/board/src/j721s2_evm/include/pinmux.h"
#include "ti/csl/csl_types.h"
#ifdef __cplusplus
extern "C" {
#endif
/* ========================================================================== */
/* Macros & Typedefs */
/* ========================================================================== */
#define PIN_MODE(mode) (mode)
#define PINMUX_END (-1)
/** \brief Active mode configurations */
/** \brief Resistor enable */
#define PIN_PULL_DISABLE (0x1U << 16U)
/** \brief Pull direction */
#define PIN_PULL_DIRECTION (0x1U << 17U)
/** \brief Receiver enable */
#define PIN_INPUT_ENABLE (0x1U << 18U)
/** \brief Driver disable */
#define PIN_OUTPUT_DISABLE (0x1U << 21U)
/** \brief Wakeup enable */
#define PIN_WAKEUP_ENABLE (0x1U << 29U)
/** \brief Pad config register offset in control module */
enum pinMainOffsets
{
PIN_MCASP1_AXR0 = 0x0C0,
PIN_MCASP1_AFSX = 0x0BC,
PIN_MCASP1_ACLKX = 0x0B8,
PIN_MCASP0_AXR12 = 0x0A0,
PIN_MCASP0_AXR13 = 0x0A4,
PIN_MCASP0_AXR14 = 0x0A8,
PIN_MCASP1_AXR3 = 0x0B0,
PIN_MCASP0_AXR15 = 0x0AC,
PIN_MCASP0_AXR7 = 0x08C,
PIN_MCASP0_AXR8 = 0x090,
PIN_MCASP0_AXR9 = 0x094,
PIN_MCASP0_AXR10 = 0x098,
PIN_MCASP1_AXR4 = 0x0B4,
PIN_MCASP0_AXR11 = 0x09C,
PIN_MCAN13_TX = 0x00C,
PIN_MCAN15_RX = 0x020,
PIN_GPIO0_11 = 0x02C,
PIN_PMIC_WAKE0 = 0x034,
PIN_MCASP0_AXR2 = 0x048,
PIN_MCASP2_AXR0 = 0x05C,
PIN_MCAN0_RX = 0x068,
PIN_MCAN1_RX = 0x070,
PIN_SPI0_CS0 = 0x0CC,
PIN_I2C0_SCL = 0x0E0,
PIN_I2C0_SDA = 0x0E4,
PIN_ECAP0_IN_APWM_OUT = 0x0C4,
PIN_EXT_REFCLK1 = 0x0C8,
PIN_MCAN0_TX = 0x064,
PIN_MCASP2_AXR1 = 0x060,
PIN_MCAN14_TX = 0x014,
PIN_MCAN13_RX = 0x010,
PIN_MCAN15_TX = 0x01C,
PIN_MCAN14_RX = 0x018,
PIN_MCAN16_RX = 0x028,
PIN_MCAN16_TX = 0x024,
PIN_MCASP0_AXR4 = 0x080,
PIN_MCASP0_AXR3 = 0x07C,
PIN_MCASP0_AFSX = 0x03C,
PIN_MCASP0_ACLKX = 0x038,
PIN_MCASP0_AXR6 = 0x088,
PIN_MCASP0_AXR5 = 0x084,
PIN_MMC1_CLK = 0x104,
PIN_MMC1_CMD = 0x108,
PIN_MMC1_CLKLB = 0x100,
PIN_MMC1_DAT0 = 0x0FC,
PIN_MMC1_DAT1 = 0x0F8,
PIN_MMC1_DAT2 = 0x0F4,
PIN_MMC1_DAT3 = 0x0F0,
PIN_TIMER_IO0 = 0x0E8,
PIN_EXTINTN = 0x000,
PIN_RESETSTATZ = 0x10C,
PIN_SOC_SAFETY_ERRORN = 0x110,
PIN_MCASP0_AXR0 = 0x040,
PIN_MCASP0_AXR1 = 0x044,
PIN_SPI0_CS1 = 0x0D0,
PIN_SPI0_CLK = 0x0D4,
PIN_SPI0_D0 = 0x0D8,
PIN_SPI0_D1 = 0x0DC,
PIN_MCAN12_RX = 0x008,
PIN_MCAN12_TX = 0x004,
PIN_MCAN2_TX = 0x074,
PIN_MCAN2_RX = 0x078,
PIN_GPIO0_12 = 0x030,
PIN_MCAN1_TX = 0x06C,
PIN_MCASP1_AXR1 = 0x04C,
PIN_MCASP1_AXR2 = 0x050,
PIN_TIMER_IO1 = 0x0EC,
};
enum pinWkupOffsets
{
PIN_MCU_ADC0_AIN0 = 0x134,
PIN_MCU_ADC0_AIN1 = 0x138,
PIN_MCU_ADC0_AIN2 = 0x13C,
PIN_MCU_ADC0_AIN3 = 0x140,
PIN_MCU_ADC0_AIN4 = 0x144,
PIN_MCU_ADC0_AIN5 = 0x148,
PIN_MCU_ADC0_AIN6 = 0x14C,
PIN_MCU_ADC0_AIN7 = 0x150,
PIN_MCU_ADC1_AIN0 = 0x154,
PIN_MCU_ADC1_AIN1 = 0x158,
PIN_MCU_ADC1_AIN2 = 0x15C,
PIN_MCU_ADC1_AIN3 = 0x160,
PIN_MCU_ADC1_AIN4 = 0x164,
PIN_MCU_ADC1_AIN5 = 0x168,
PIN_MCU_ADC1_AIN6 = 0x16C,
PIN_MCU_ADC1_AIN7 = 0x170,
PIN_MCU_RGMII1_RD0 = 0x094,
PIN_MCU_RGMII1_RD1 = 0x090,
PIN_MCU_RGMII1_RD2 = 0x08C,
PIN_MCU_RGMII1_RD3 = 0x088,
PIN_MCU_RGMII1_RXC = 0x084,
PIN_MCU_RGMII1_RX_CTL = 0x06C,
PIN_MCU_RGMII1_TD0 = 0x07C,
PIN_MCU_RGMII1_TD1 = 0x078,
PIN_MCU_RGMII1_TD2 = 0x074,
PIN_MCU_RGMII1_TD3 = 0x070,
PIN_MCU_RGMII1_TXC = 0x080,
PIN_MCU_RGMII1_TX_CTL = 0x068,
PIN_MCU_I2C0_SCL = 0x108,
PIN_MCU_I2C0_SDA = 0x10C,
PIN_WKUP_GPIO0_8 = 0x0E0,
PIN_WKUP_GPIO0_9 = 0x0E4,
PIN_WKUP_GPIO0_11 = 0x0EC,
PIN_MCU_MCAN0_RX = 0x0BC,
PIN_MCU_MCAN0_TX = 0x0B8,
PIN_WKUP_GPIO0_5 = 0x0D4,
PIN_WKUP_GPIO0_4 = 0x0D0,
PIN_MCU_MDIO0_MDC = 0x09C,
PIN_MCU_MDIO0_MDIO = 0x098,
PIN_MCU_OSPI0_CLK = 0x000,
PIN_MCU_OSPI0_CSN0 = 0x02C,
PIN_MCU_OSPI0_D0 = 0x00C,
PIN_MCU_OSPI0_D1 = 0x010,
PIN_MCU_OSPI0_D2 = 0x014,
PIN_MCU_OSPI0_D3 = 0x018,
PIN_MCU_OSPI0_D4 = 0x01C,
PIN_MCU_OSPI0_D5 = 0x020,
PIN_MCU_OSPI0_D6 = 0x024,
PIN_MCU_OSPI0_D7 = 0x028,
PIN_MCU_OSPI0_DQS = 0x008,
PIN_MCU_OSPI0_CSN3 = 0x03C,
PIN_MCU_OSPI0_CSN2 = 0x038,
PIN_MCU_OSPI1_CLK = 0x040,
PIN_MCU_OSPI1_CSN0 = 0x05C,
PIN_MCU_OSPI1_D0 = 0x04C,
PIN_MCU_OSPI1_D1 = 0x050,
PIN_MCU_OSPI1_D2 = 0x054,
PIN_MCU_OSPI1_D3 = 0x058,
PIN_MCU_OSPI1_DQS = 0x048,
PIN_MCU_OSPI1_LBCLKO = 0x044,
PIN_WKUP_GPIO0_14 = 0x0F8,
PIN_WKUP_GPIO0_15 = 0x0FC,
PIN_WKUP_GPIO0_13 = 0x0F4,
PIN_WKUP_GPIO0_12 = 0x0F0,
PIN_WKUP_GPIO0_0 = 0x0C0,
PIN_WKUP_GPIO0_1 = 0x0C4,
PIN_WKUP_GPIO0_2 = 0x0C8,
PIN_WKUP_GPIO0_3 = 0x0CC,
PIN_WKUP_GPIO0_6 = 0x0D8,
PIN_WKUP_GPIO0_7 = 0x0DC,
PIN_WKUP_GPIO0_30 = 0x03C,
PIN_WKUP_GPIO0_57 = 0x17C,
PIN_MCU_OSPI1_CSN1 = 0x060,
PIN_WKUP_GPIO0_49 = 0x190,
PIN_MCU_SPI0_D0 = 0x0A4,
PIN_WKUP_GPIO0_56 = 0x120,
PIN_MCU_SPI0_D1 = 0x0A8,
PIN_MCU_SPI0_CS0 = 0x0AC,
PIN_WKUP_I2C0_SCL = 0x100,
PIN_WKUP_I2C0_SDA = 0x104,
PIN_WKUP_UART0_RXD = 0x0B0,
PIN_WKUP_UART0_TXD = 0x0B4,
PIN_MCU_OSPI0_LBCLKO = 0x004,
};
/* ========================================================================== */
/* Global Variables */
/* ========================================================================== */
/** \brief Pinmux configuration data for the board. Auto-generated from
Pinmux tool. */
extern pinmuxBoardCfg_t gJ721S2_MainPinmuxData[];
extern pinmuxBoardCfg_t gJ721S2_WkupPinmuxData[];
#ifdef __cplusplus
}
#endif /* __cplusplus */
#endif /* _J721S2_PIN_MUX_H_ */
/**
* Note: This file was auto-generated by TI PinMux on 10/24/2021 at 3:31:41 AM.
*
* \file J721S2_pinmux_data.c
*
* \brief This file contains the pin mux configurations for the boards.
* These are prepared based on how the peripherals are extended on
* the boards.
*
* \copyright Copyright (CU) 2021 Texas Instruments Incorporated -
* http://www.ti.com/
*/
/* ========================================================================== */
/* Include Files */
/* ========================================================================== */
#include "J721S2_pinmux.h"
/** Peripheral Pin Configurations */
static pinmuxPerCfg_t gCpsw2g0PinCfg[] =
{
#if 0
/* MyCPSW2G0 -> MDIO0_MDC -> T28 */
{
PIN_MCASP1_AXR0, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> MDIO0_MDIO -> V28 */
{
PIN_MCASP1_AFSX, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#endif
/* MyCPSW2G0 -> RGMII1_RD0 -> AA24 */
{
PIN_MCASP1_ACLKX, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_RD1 -> AB25 */
{
PIN_MCASP0_AXR12, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_RD2 -> T23 */
{
PIN_MCASP0_AXR13, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_RD3 -> U24 */
{
PIN_MCASP0_AXR14, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_RXC -> AD26 */
{
PIN_MCASP1_AXR3, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_RX_CTL -> AC25 */
{
PIN_MCASP0_AXR15, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_TD0 -> T25 */
{
PIN_MCASP0_AXR7, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_TD1 -> W24 */
{
PIN_MCASP0_AXR8, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_TD2 -> AA25 */
{
PIN_MCASP0_AXR9, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_TD3 -> V25 */
{
PIN_MCASP0_AXR10, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_TXC -> U25 */
{
PIN_MCASP1_AXR4, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyCPSW2G0 -> RGMII1_TX_CTL -> T24 */
{
PIN_MCASP0_AXR11, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gCpsw2gPinCfg[] =
{
{0, TRUE, gCpsw2g0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gGpio0PinCfg[] =
{
/* MyGPIO0 -> GPIO0_3 -> AE28 */
{
PIN_MCAN13_TX, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyGPIO0 -> GPIO0_8 -> AA23 */
{
PIN_MCAN15_RX, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyGPIO0 -> GPIO0_11 -> V23 */
{
PIN_GPIO0_11, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyGPIO0 -> GPIO0_13 -> AD24 */
{
PIN_PMIC_WAKE0, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyGPIO0 -> GPIO0_18 -> AB27 */
{
PIN_MCASP0_AXR2, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyGPIO0 -> GPIO0_23 -> AA26 */
{
PIN_MCASP2_AXR0, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#if 0 //change can0
/* MyGPIO0 -> GPIO0_26 -> U28 */
{
PIN_MCAN0_RX, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#endif
/* MyGPIO0 -> GPIO0_28 -> R27 */
{
PIN_MCAN1_RX, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyGPIO0 -> GPIO0_51 -> AE27 */
{
PIN_SPI0_CS0, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gGpioPinCfg[] =
{
{0, TRUE, gGpio0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gI2c0PinCfg[] =
{
/* MyI2C0 -> I2C0_SCL -> AH25 */
{
PIN_I2C0_SCL, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyI2C0 -> I2C0_SDA -> AE24 */
{
PIN_I2C0_SDA, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gI2c1PinCfg[] =
{
/* MyI2C1 -> I2C1_SCL -> AB26 */
{
PIN_ECAP0_IN_APWM_OUT, PIN_MODE(13) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyI2C1 -> I2C1_SDA -> AD28 */
{
PIN_EXT_REFCLK1, PIN_MODE(13) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gI2c3PinCfg[] =
{
#if 0 //change can
/* MyI2C3 -> I2C3_SCL -> W28 */
{
PIN_MCAN0_TX, PIN_MODE(13) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#endif
/* MyI2C3 -> I2C3_SDA -> AC27 */
{
PIN_MCASP2_AXR1, PIN_MODE(13) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gI2c4PinCfg[] =
{
/* MyI2C4 -> I2C4_SCL -> AD25 */
{
PIN_MCAN14_TX, PIN_MODE(8) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyI2C4 -> I2C4_SDA -> AF28 */
{
PIN_MCAN13_RX, PIN_MODE(8) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gI2c5PinCfg[] =
{
/* MyI2C5 -> I2C5_SCL -> Y24 */
{
PIN_MCAN15_TX, PIN_MODE(8) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyI2C5 -> I2C5_SDA -> W23 */
{
PIN_MCAN14_RX, PIN_MODE(8) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gI2cPinCfg[] =
{
{0, TRUE, gI2c0PinCfg},
{1, TRUE, gI2c1PinCfg},
{3, TRUE, gI2c3PinCfg},
{4, TRUE, gI2c4PinCfg},
{5, TRUE, gI2c5PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcan6PinCfg[] =
{
/* MyMCAN16 -> MCAN16_RX -> AB24 */
{
PIN_MCAN16_RX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCAN16 -> MCAN16_TX -> Y28 */
{
PIN_MCAN16_TX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcan3PinCfg[] =
{
/* MyMCAN3 -> MCAN3_RX -> U26 */
{
PIN_MCASP0_AXR4, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCAN3 -> MCAN3_TX -> T27 */
{
PIN_MCASP0_AXR3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcan5PinCfg[] =
{
/* MyMCAN5 -> MCAN5_RX -> U27 */
{
PIN_MCASP0_AFSX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCAN5 -> MCAN5_TX -> AB28 */
{
PIN_MCASP0_ACLKX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcan4PinCfg[] =
{
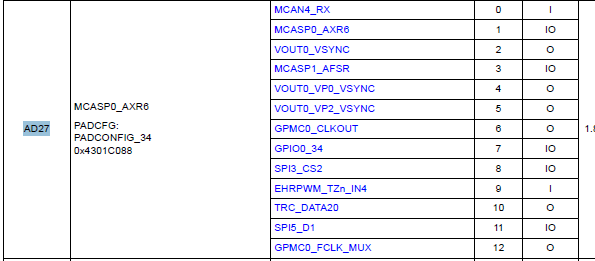
/* MyMCAN4 -> MCAN4_RX -> AD27 */
{
PIN_MCASP0_AXR6, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
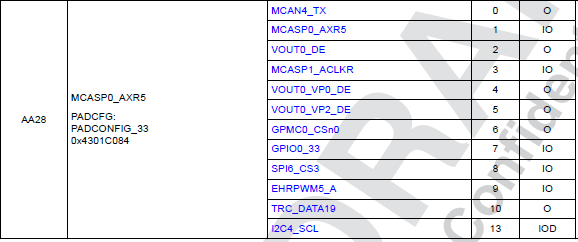
/* MyMCAN4 -> MCAN4_TX -> AA28 */
{
PIN_MCASP0_AXR5, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcan0PinCfg[] =
{
/* MyMCAN0 -> MCAN0_TX -> W28 */
{
PIN_MCAN0_TX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCAN0 -> MCAN0_RX -> U28 */
{
PIN_MCAN0_RX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
};
static pinmuxModuleCfg_t gMcanPinCfg[] =
{
{6, TRUE, gMcan6PinCfg},
{3, TRUE, gMcan3PinCfg},
{5, TRUE, gMcan5PinCfg},
{4, TRUE, gMcan4PinCfg},
{0, TRUE, gMcan0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_adc0PinCfg[] =
{
/* MyMCU_ADC0 -> MCU_ADC0_AIN0 -> L25 */
{
PIN_MCU_ADC0_AIN0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC0 -> MCU_ADC0_AIN1 -> K25 */
{
PIN_MCU_ADC0_AIN1, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC0 -> MCU_ADC0_AIN2 -> M24 */
{
PIN_MCU_ADC0_AIN2, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC0 -> MCU_ADC0_AIN3 -> L24 */
{
PIN_MCU_ADC0_AIN3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC0 -> MCU_ADC0_AIN4 -> L27 */
{
PIN_MCU_ADC0_AIN4, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC0 -> MCU_ADC0_AIN5 -> K24 */
{
PIN_MCU_ADC0_AIN5, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC0 -> MCU_ADC0_AIN6 -> M27 */
{
PIN_MCU_ADC0_AIN6, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC0 -> MCU_ADC0_AIN7 -> M26 */
{
PIN_MCU_ADC0_AIN7, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_adc1PinCfg[] =
{
/* MyMCU_ADC1 -> MCU_ADC1_AIN0 -> P25 */
{
PIN_MCU_ADC1_AIN0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC1 -> MCU_ADC1_AIN1 -> R25 */
{
PIN_MCU_ADC1_AIN1, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC1 -> MCU_ADC1_AIN2 -> P28 */
{
PIN_MCU_ADC1_AIN2, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC1 -> MCU_ADC1_AIN3 -> P27 */
{
PIN_MCU_ADC1_AIN3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC1 -> MCU_ADC1_AIN4 -> N25 */
{
PIN_MCU_ADC1_AIN4, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC1 -> MCU_ADC1_AIN5 -> P26 */
{
PIN_MCU_ADC1_AIN5, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC1 -> MCU_ADC1_AIN6 -> N26 */
{
PIN_MCU_ADC1_AIN6, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_ADC1 -> MCU_ADC1_AIN7 -> N27 */
{
PIN_MCU_ADC1_AIN7, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_adcPinCfg[] =
{
{0, TRUE, gMcu_adc0PinCfg},
{1, TRUE, gMcu_adc1PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_cpsw2g0PinCfg[] =
{
/* MyMCU_CPSW2G0 -> MCU_RGMII1_RD0 -> B22 */
{
PIN_MCU_RGMII1_RD0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_RD1 -> B21 */
{
PIN_MCU_RGMII1_RD1, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_RD2 -> C22 */
{
PIN_MCU_RGMII1_RD2, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_RD3 -> D23 */
{
PIN_MCU_RGMII1_RD3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_RXC -> D22 */
{
PIN_MCU_RGMII1_RXC, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_RX_CTL -> E23 */
{
PIN_MCU_RGMII1_RX_CTL, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_TD0 -> F23 */
{
PIN_MCU_RGMII1_TD0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_TD1 -> G22 */
{
PIN_MCU_RGMII1_TD1, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_TD2 -> E21 */
{
PIN_MCU_RGMII1_TD2, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_TD3 -> E22 */
{
PIN_MCU_RGMII1_TD3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_TXC -> F21 */
{
PIN_MCU_RGMII1_TXC, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_CPSW2G0 -> MCU_RGMII1_TX_CTL -> F22 */
{
PIN_MCU_RGMII1_TX_CTL, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_cpsw2gPinCfg[] =
{
{0, TRUE, gMcu_cpsw2g0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_i2c0PinCfg[] =
{
/* MyMCU_I2C0 -> MCU_I2C0_SCL -> G24 */
{
PIN_MCU_I2C0_SCL, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_I2C0 -> MCU_I2C0_SDA -> J25 */
{
PIN_MCU_I2C0_SDA, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_i2cPinCfg[] =
{
{0, TRUE, gMcu_i2c0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_i3c0PinCfg[] =
{
/* MyMCU_I3C1 -> MCU_I3C0_SCL -> F24 */
{
PIN_WKUP_GPIO0_8, PIN_MODE(3) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_I3C1 -> MCU_I3C0_SDA -> H26 */
{
PIN_WKUP_GPIO0_9, PIN_MODE(3) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#if 0
//---MCU_MCAN0_EN---
/* MyMCU_I3C1 -> MCU_I3C0_SDAPULLEN -> F25 */
{
PIN_WKUP_GPIO0_11, PIN_MODE(5) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#endif
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_i3cPinCfg[] =
{
{0, TRUE, gMcu_i3c0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_mcan0PinCfg[] =
{
/* MyMCU_MCAN0 -> MCU_MCAN0_RX -> E28 */
{
PIN_MCU_MCAN0_RX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_MCAN0 -> MCU_MCAN0_TX -> E27 */
{
PIN_MCU_MCAN0_TX, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_mcan1PinCfg[] =
{
/* MyMCU_MCAN1 -> MCU_MCAN1_RX -> F26 */
{
PIN_WKUP_GPIO0_5, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_MCAN1 -> MCU_MCAN1_TX -> C23 */
{
PIN_WKUP_GPIO0_4, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_mcanPinCfg[] =
{
{0, TRUE, gMcu_mcan0PinCfg},
{1, TRUE, gMcu_mcan1PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_mdio0PinCfg[] =
{
/* MyMCU_MDIO0 -> MCU_MDIO0_MDC -> A21 */
{
PIN_MCU_MDIO0_MDC, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_MDIO0 -> MCU_MDIO0_MDIO -> A22 */
{
PIN_MCU_MDIO0_MDIO, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_mdioPinCfg[] =
{
{0, TRUE, gMcu_mdio0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_ospi0PinCfg[] =
{
/* MyMCU_OSPI0 -> MCU_OSPI0_CLK -> D19 */
{
PIN_MCU_OSPI0_CLK, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_CSn0 -> F15 */
{
PIN_MCU_OSPI0_CSN0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#if 0
/* MyMCU_OSPI0 -> MCU_OSPI0_D0 -> C19 */
{
PIN_MCU_OSPI0_D0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#endif
/* MyMCU_OSPI0 -> MCU_OSPI0_D1 -> F16 */
{
PIN_MCU_OSPI0_D1, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_D2 -> G15 */
{
PIN_MCU_OSPI0_D2, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_D3 -> F18 */
{
PIN_MCU_OSPI0_D3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_D4 -> E19 */
{
PIN_MCU_OSPI0_D4, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_D5 -> G19 */
{
PIN_MCU_OSPI0_D5, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_D6 -> F19 */
{
PIN_MCU_OSPI0_D6, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_D7 -> F20 */
{
PIN_MCU_OSPI0_D7, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_DQS -> E18 */
{
PIN_MCU_OSPI0_DQS, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_ECC_FAIL -> F17 */
{
PIN_MCU_OSPI0_CSN3, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI0 -> MCU_OSPI0_RESET_OUT0 -> F14 */
{
PIN_MCU_OSPI0_CSN2, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_ospi1PinCfg[] =
{
/* MyMCU_OSPI1 -> MCU_OSPI1_CLK -> A19 */
{
PIN_MCU_OSPI1_CLK, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI1 -> MCU_OSPI1_CSn0 -> D20 */
{
PIN_MCU_OSPI1_CSN0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI1 -> MCU_OSPI1_D0 -> D21 */
{
PIN_MCU_OSPI1_D0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI1 -> MCU_OSPI1_D1 -> G20 */
{
PIN_MCU_OSPI1_D1, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI1 -> MCU_OSPI1_D2 -> C20 */
{
PIN_MCU_OSPI1_D2, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI1 -> MCU_OSPI1_D3 -> A20 */
{
PIN_MCU_OSPI1_D3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI1 -> MCU_OSPI1_DQS -> B19 */
{
PIN_MCU_OSPI1_DQS, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_OSPI1 -> MCU_OSPI1_LBCLKO -> B20 */
{
PIN_MCU_OSPI1_LBCLKO, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_ospiPinCfg[] =
{
{0, TRUE, gMcu_ospi0PinCfg},
{1, TRUE, gMcu_ospi1PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMcu_uart0PinCfg[] =
{
/* MyMCU_UART0 -> MCU_UART0_CTSn -> B24 */
{
PIN_WKUP_GPIO0_14, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_UART0 -> MCU_UART0_RTSn -> D25 */
{
PIN_WKUP_GPIO0_15, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_UART0 -> MCU_UART0_RXD -> C24 */
{
PIN_WKUP_GPIO0_13, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_UART0 -> MCU_UART0_TXD -> C25 */
{
PIN_WKUP_GPIO0_12, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMcu_uartPinCfg[] =
{
{0, TRUE, gMcu_uart0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gMmcsd1PinCfg[] =
{
/* MyMMCSD1 -> MMC1_CLK -> P23 */
{
PIN_MMC1_CLK, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMMCSD1 -> MMC1_CMD -> N24 */
{
PIN_MMC1_CMD, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMMCSD1 -> MMC1_DAT0 -> M23 */
{
PIN_MMC1_DAT0, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMMCSD1 -> MMC1_DAT1 -> P24 */
{
PIN_MMC1_DAT1, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMMCSD1 -> MMC1_DAT2 -> R24 */
{
PIN_MMC1_DAT2, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMMCSD1 -> MMC1_DAT3 -> R22 */
{
PIN_MMC1_DAT3, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMMCSD1 -> MMC1_SDCD -> AE25 */
{
PIN_TIMER_IO0, PIN_MODE(8) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMMC1 -> MMC1_CLKLB */
{
PIN_MMC1_CLKLB, PIN_MODE(0) | \
((PIN_PULL_DIRECTION | PIN_INPUT_ENABLE) & (~PIN_PULL_DISABLE))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gMmcsdPinCfg[] =
{
{1, TRUE, gMmcsd1PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gSystem0PinCfg[] =
{
/* MySYSTEM0 -> EXTINTn -> AG24 */
{
PIN_EXTINTN, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MySYSTEM0 -> RESETSTATz -> AF27 */
{
PIN_RESETSTATZ, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MySYSTEM0 -> SOC_SAFETY_ERRORn -> AF25 */
{
PIN_SOC_SAFETY_ERRORN, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gSystemPinCfg[] =
{
{0, TRUE, gSystem0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gUart8PinCfg[] =
{
/* MyUART8 -> UART8_CTSn -> AC28 */
{
PIN_MCASP0_AXR0, PIN_MODE(14) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART8 -> UART8_RTSn -> Y26 */
{
PIN_MCASP0_AXR1, PIN_MODE(14) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART8 -> UART8_RXD -> AF26 */
{
PIN_SPI0_CS1, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART8 -> UART8_TXD -> AH27 */
{
PIN_SPI0_CLK, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gUart2PinCfg[] =
{
/* MyUART2 -> UART2_RXD -> AG26 */
{
PIN_SPI0_D0, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART2 -> UART2_TXD -> AH26 */
{
PIN_SPI0_D1, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gUart5PinCfg[] =
{
/* MyUART5 -> UART5_RXD -> AC24 */
{
PIN_MCAN12_RX, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART5 -> UART5_TXD -> W25 */
{
PIN_MCAN12_TX, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gUart3PinCfg[] =
{
/* MyUART3 -> UART3_RXD -> R28 */
{
PIN_MCAN2_TX, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART3 -> UART3_TXD -> Y25 */
{
PIN_MCAN2_RX, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gUart6PinCfg[] =
{
/* MyUART6 -> UART6_RXD -> T26 */
{
PIN_GPIO0_12, PIN_MODE(12) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART6 -> UART6_TXD -> V26 */
{
PIN_MCAN1_TX, PIN_MODE(11) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxPerCfg_t gUart9PinCfg[] =
{
/* MyUART9 -> UART9_RXD -> V27 */
{
PIN_MCASP1_AXR1, PIN_MODE(12) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyUART9 -> UART9_TXD -> W27 */
{
PIN_MCASP1_AXR2, PIN_MODE(12) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gUartPinCfg[] =
{
{8, TRUE, gUart8PinCfg},
{2, TRUE, gUart2PinCfg},
{5, TRUE, gUart5PinCfg},
{3, TRUE, gUart3PinCfg},
{6, TRUE, gUart6PinCfg},
{9, TRUE, gUart9PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gUsb0PinCfg[] =
{
/* MyUSB0 -> USB0_DRVVBUS -> AG25 */
{
PIN_TIMER_IO1, PIN_MODE(6) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gUsbPinCfg[] =
{
{0, TRUE, gUsb0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gWkup_gpio0PinCfg[] =
{
/* MyWKUP_GPIO0 -> WKUP_GPIO0_0 -> D26 */
{
PIN_WKUP_GPIO0_0, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_1 -> E24 */
{
PIN_WKUP_GPIO0_1, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCAN fd 4 --> STB --> E20 */
{
PIN_MCU_OSPI0_LBCLKO, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#if 1
/* MyMCU_OSPI0 -> WKUP_GPIO0_19 -> C19 */
{
PIN_MCU_OSPI0_D0, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyMCU_I3C1 -> MCU_I3C0_SDAPULLEN -> F25 */
{
PIN_WKUP_GPIO0_11, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
#endif
/* MyWKUP_GPIO0 -> WKUP_GPIO0_2 -> C28 */
{
PIN_WKUP_GPIO0_2, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_3 -> C27 */
{
PIN_WKUP_GPIO0_3, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_6 -> E25 */
{
PIN_WKUP_GPIO0_6, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_7 -> F28 */
{
PIN_WKUP_GPIO0_7, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_57 -> J26 */
{
PIN_WKUP_GPIO0_30, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_57 -> J26 */
{
PIN_WKUP_GPIO0_57, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_39 -> C21 */
{
PIN_MCU_OSPI1_CSN1, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_49 -> K26 */
{
PIN_WKUP_GPIO0_49, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_55 -> D24 */
{
PIN_MCU_SPI0_D0, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_56 -> G27 */
{
PIN_WKUP_GPIO0_56, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_69 -> B25 */
{
PIN_MCU_SPI0_D1, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_GPIO0 -> WKUP_GPIO0_70 -> B26 */
{
PIN_MCU_SPI0_CS0, PIN_MODE(7) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gWkup_gpioPinCfg[] =
{
{0, TRUE, gWkup_gpio0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gWkup_i2c0PinCfg[] =
{
/* MyWKUP_I2C0 -> WKUP_I2C0_SCL -> H24 */
{
PIN_WKUP_I2C0_SCL, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_I2C0 -> WKUP_I2C0_SDA -> H27 */
{
PIN_WKUP_I2C0_SDA, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gWkup_i2cPinCfg[] =
{
{0, TRUE, gWkup_i2c0PinCfg},
{PINMUX_END}
};
static pinmuxPerCfg_t gWkup_uart0PinCfg[] =
{
/* MyWKUP_UART0 -> WKUP_UART0_RXD -> D28 */
{
PIN_WKUP_UART0_RXD, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
/* MyWKUP_UART0 -> WKUP_UART0_TXD -> D27 */
{
PIN_WKUP_UART0_TXD, PIN_MODE(0) | \
((PIN_PULL_DISABLE | PIN_INPUT_ENABLE) & (~PIN_PULL_DIRECTION))
},
{PINMUX_END}
};
static pinmuxModuleCfg_t gWkup_uartPinCfg[] =
{
{0, TRUE, gWkup_uart0PinCfg},
{PINMUX_END}
};
pinmuxBoardCfg_t gJ721S2_MainPinmuxData[] =
{
{0, gCpsw2gPinCfg},
{1, gGpioPinCfg},
{2, gI2cPinCfg},
{3, gMcanPinCfg},
{4, gMmcsdPinCfg},
{5, gSystemPinCfg},
{6, gUartPinCfg},
{7, gUsbPinCfg},
{PINMUX_END}
};
pinmuxBoardCfg_t gJ721S2_WkupPinmuxData[] =
{
{0, gMcu_adcPinCfg},
{1, gMcu_cpsw2gPinCfg},
{2, gMcu_i2cPinCfg},
{3, gMcu_i3cPinCfg},
{4, gMcu_mcanPinCfg},
{5, gMcu_mdioPinCfg},
{6, gMcu_ospiPinCfg},
{7, gMcu_uartPinCfg},
{8, gWkup_gpioPinCfg},
{9, gWkup_i2cPinCfg},
{10, gWkup_uartPinCfg},
{PINMUX_END}
};