Hello, TI Expert.
I am using TIDOFSimulator1.6.8b with the documentation TIDOFSimulatorUserGuide.pdf.
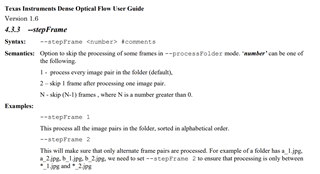
Among the simulator config parameters is --stepFrame, which I used.
However, I built the one in j721e-evm-08_06_01_03 psdk and used it for TDA4xVM as follows. ./vx_app_dense_optical_flow.out --cfg ./app_dof.cfg
But I can't seem to use configs like --stepFrame in app_dof.cfg, how can I use stepFrame in target simulator?
Best Regards,
Hyeonseong.