Hi
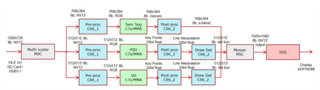
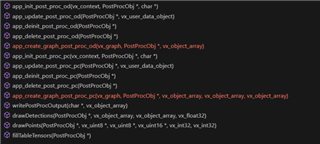
I want to use cameras for vehicle detection, so I delete the post process in AVP4, then add vd's post_proc_moduleand draw_detections_module in AVP to AVP4, and then replacing the network and config of TIDL.
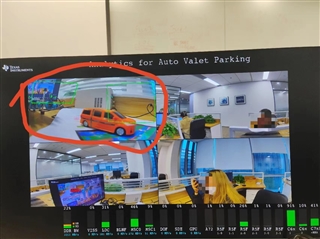
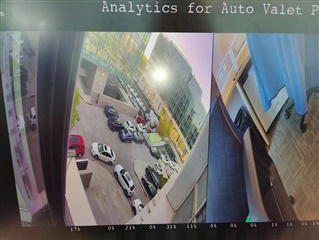
The images can be displayed normally,but don't display the detection box of vehicle. I pressed 'P', it displays as follows. Can you provide some advice?
RTOS: 08-04.
Summary of CPU load, ==================== CPU: mpu1_0: TOTAL LOAD = 1.70 % ( HWI = 0.56 %, SWI = 0. 0 % ) CPU: mcu1_0: TOTAL LOAD = 1. 0 % ( HWI = 0. 0 %, SWI = 0. 0 % ) CPU: mcu2_0: TOTAL LOAD = 19. 0 % ( HWI = 0. 0 %, SWI = 0. 0 % ) CPU: mcu2_1: TOTAL LOAD = 1. 0 % ( HWI = 0. 0 %, SWI = 0. 0 % ) CPU: mcu3_0: TOTAL LOAD = 1. 0 % ( HWI = 0. 0 %, SWI = 0. 0 % ) CPU: c6x_1: TOTAL LOAD = 8. 0 % ( HWI = 0. 0 %, SWI = 0. 0 % ) CPU: c6x_2: TOTAL LOAD = 1. 0 % ( HWI = 0. 0 %, SWI = 0. 0 % ) CPU: c7x_1: TOTAL LOAD = 27. 0 % ( HWI = 0. 0 %, SWI = 0. 0 % ) HWA performance statistics, =========================== HWA: LDC : LOAD = 21.67 % ( 130 MP/s ) HWA: MSC0: LOAD = 32.98 % ( 198 MP/s ) HWA: MSC1: LOAD = 11. 7 % ( 71 MP/s ) DDR performance statistics, =========================== DDR: READ BW: AVG = 1804 MB/s, PEAK = 13824 MB/s DDR: WRITE BW: AVG = 725 MB/s, PEAK = 6348 MB/s DDR: TOTAL BW: AVG = 2529 MB/s, PEAK = 20172 MB/s Detailed CPU performance/memory statistics, =========================================== DDR_SHARED_MEM: Alloc's: 100 alloc's of 108348444 bytes DDR_SHARED_MEM: Free's : 3 free's of 279296 bytes DDR_SHARED_MEM: Open's : 97 allocs of 108069148 bytes DDR_SHARED_MEM: Total size: 536870912 bytes CPU: mcu1_0: TASK: IPC_RX: 0. 0 % CPU: mcu1_0: TASK: REMOTE_SRV: 0.32 % CPU: mcu1_0: TASK: LOAD_TEST: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_RX: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu1_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu1_0: HEAP: DDR_LOCAL_MEM: size = 8388608 B, free = 8388352 B ( 99 % unused) CPU: mcu2_0: TASK: IPC_RX: 0.75 % CPU: mcu2_0: TASK: REMOTE_SRV: 0.70 % CPU: mcu2_0: TASK: LOAD_TEST: 0. 0 % CPU: mcu2_0: TASK: TIVX_CPU_0: 0. 0 % CPU: mcu2_0: TASK: TIVX_VPAC_N: 0. 0 % CPU: mcu2_0: TASK: TIVX_VPAC_L: 2.20 % CPU: mcu2_0: TASK: TIVX_VPAC_M: 5. 6 % CPU: mcu2_0: TASK: TIVX_VPAC_M: 0. 0 % CPU: mcu2_0: TASK: TIVX_VPAC_V: 0. 0 % CPU: mcu2_0: TASK: TIVX_CAPT1: 1.15 % CPU: mcu2_0: TASK: TIVX_CAPT2: 0. 0 % CPU: mcu2_0: TASK: TIVX_DISP1: 0.84 % CPU: mcu2_0: TASK: TIVX_DISP2: 0. 0 % CPU: mcu2_0: TASK: TIVX_CSITX: 0. 0 % CPU: mcu2_0: TASK: TIVX_CAPT3: 0. 0 % CPU: mcu2_0: TASK: TIVX_CAPT4: 0. 0 % CPU: mcu2_0: TASK: TIVX_CAPT5: 0. 0 % CPU: mcu2_0: TASK: TIVX_CAPT6: 0. 0 % CPU: mcu2_0: TASK: TIVX_CAPT7: 0. 0 % CPU: mcu2_0: TASK: TIVX_CAPT8: 0. 0 % CPU: mcu2_0: TASK: TIVX_DISP_M: 0. 0 % CPU: mcu2_0: TASK: TIVX_DISP_M: 0. 0 % CPU: mcu2_0: TASK: TIVX_DISP_M: 0. 0 % CPU: mcu2_0: TASK: TIVX_DISP_M: 0. 0 % CPU: mcu2_0: HEAP: DDR_LOCAL_MEM: size = 16777216 B, free = 16693248 B ( 99 % unused) CPU: mcu2_0: HEAP: L3_MEM: size = 262144 B, free = 261888 B ( 99 % unused) CPU: mcu2_1: TASK: IPC_RX: 0. 0 % CPU: mcu2_1: TASK: REMOTE_SRV: 0.28 % CPU: mcu2_1: TASK: LOAD_TEST: 0. 0 % CPU: mcu2_1: TASK: TIVX_SDE: 0. 0 % CPU: mcu2_1: TASK: TIVX_DOF: 0. 0 % CPU: mcu2_1: TASK: TIVX_CPU_1: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_RX: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu2_1: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu2_1: HEAP: DDR_LOCAL_MEM: size = 16777216 B, free = 16773376 B ( 99 % unused) CPU: mcu2_1: HEAP: L3_MEM: size = 262144 B, free = 262144 B (100 % unused) CPU: mcu3_0: TASK: IPC_RX: 0. 0 % CPU: mcu3_0: TASK: REMOTE_SRV: 0.22 % CPU: mcu3_0: TASK: LOAD_TEST: 0. 0 % CPU: mcu3_0: TASK: TIVX_MCU3_0: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_RX: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu3_0: TASK: IPC_TEST_TX: 0. 0 % CPU: mcu3_0: HEAP: DDR_LOCAL_MEM: size = 8388608 B, free = 8388352 B ( 99 % unused) CPU: c6x_1: TASK: IPC_RX: 0. 4 % CPU: c6x_1: TASK: REMOTE_SRV: 0. 7 % CPU: c6x_1: TASK: LOAD_TEST: 0. 0 % CPU: c6x_1: TASK: TIVX_CPU: 7.92 % CPU: c6x_1: TASK: IPC_TEST_RX: 0. 0 % CPU: c6x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_1: HEAP: DDR_LOCAL_MEM: size = 16777216 B, free = 16753408 B ( 99 % unused) CPU: c6x_1: HEAP: L2_MEM: size = 229376 B, free = 0 B ( 0 % unused) CPU: c6x_1: HEAP: DDR_SCRATCH_MEM: size = 50331648 B, free = 50331648 B (100 % unused) CPU: c6x_2: TASK: IPC_RX: 0. 1 % CPU: c6x_2: TASK: REMOTE_SRV: 0. 6 % CPU: c6x_2: TASK: LOAD_TEST: 0. 0 % CPU: c6x_2: TASK: TIVX_CPU: 0.51 % CPU: c6x_2: TASK: IPC_TEST_RX: 0. 0 % CPU: c6x_2: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_2: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_2: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_2: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_2: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_2: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_2: TASK: IPC_TEST_TX: 0. 0 % CPU: c6x_2: HEAP: DDR_LOCAL_MEM: size = 16777216 B, free = 16540416 B ( 98 % unused) CPU: c6x_2: HEAP: L2_MEM: size = 229376 B, free = 229376 B (100 % unused) CPU: c6x_2: HEAP: DDR_SCRATCH_MEM: size = 50331648 B, free = 50331648 B (100 % unused) CPU: c7x_1: TASK: IPC_RX: 0. 3 % CPU: c7x_1: TASK: REMOTE_SRV: 0. 7 % CPU: c7x_1: TASK: LOAD_TEST: 0. 0 % CPU: c7x_1: TASK: TIVX_C7_1_P: 26.13 % CPU: c7x_1: TASK: TIVX_C7_1_P: 0. 0 % CPU: c7x_1: TASK: TIVX_C7_1_P: 0. 0 % CPU: c7x_1: TASK: TIVX_C7_1_P: 0. 0 % CPU: c7x_1: TASK: TIVX_C7_1_P: 0. 0 % CPU: c7x_1: TASK: TIVX_C7_1_P: 0. 0 % CPU: c7x_1: TASK: TIVX_C7_1_P: 0. 0 % CPU: c7x_1: TASK: TIVX_C7_1_P: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_RX: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c7x_1: TASK: IPC_TEST_TX: 0. 0 % CPU: c7x_1: HEAP: DDR_LOCAL_MEM: size = 268435456 B, free = 206148352 B ( 76 % unused) CPU: c7x_1: HEAP: L3_MEM: size = 8159232 B, free = 0 B ( 0 % unused) CPU: c7x_1: HEAP: L2_MEM: size = 458752 B, free = 458752 B (100 % unused) CPU: c7x_1: HEAP: L1_MEM: size = 16384 B, free = 0 B ( 0 % unused) CPU: c7x_1: HEAP: DDR_SCRATCH_MEM: size = 385875968 B, free = 382213397 B ( 99 % unused) GRAPH: app_tidl_avp5_graph (#nodes = 9, #executions = 6373) NODE: CAPTURE1: capture_node: avg = 33239 usecs, min/max = 32536 / 45093 usecs, #executions = 6373 NODE: VPAC_LDC1: ldc_node: avg = 7047 usecs, min/max = 6855 / 8027 usecs, #executions = 6373 NODE: VPAC_MSC1: scaler_node: avg = 10450 usecs, min/max = 10334 / 11126 usecs, #executions = 6373 NODE: DSP-1: ODPreProcNode: avg = 1784 usecs, min/max = 1774 / 2163 usecs, #executions = 6373 NODE: DSP_C7-1: ODTIDLNode: avg = 8676 usecs, min/max = 8643 / 8940 usecs, #executions = 6373 NODE: DSP-2: ODPostProcNode: avg = 367 usecs, min/max = 105 / 4006 usecs, #executions = 6373 NODE: DSP-1: DrawDetectionsNode: avg = 3571 usecs, min/max = 3544 / 4229 usecs, #executions = 6373 NODE: VPAC_MSC1: mosaic_node: avg = 4090 usecs, min/max = 3724 / 32790 usecs, #executions = 6373 NODE: DISPLAY1: DisplayNode: avg = 7503 usecs, min/max = 99 / 16573 usecs, #executions = 6373 PERF: FILEIO: avg = 0 usecs, min/max = 4294967295 / 0 usecs, #executions = 0 PERF: TOTAL: avg = 41665 usecs, min/max = 40827 / 42546 usecs, #executions = 21 PERF: TOTAL: 24. 0 FPS