Part Number: J721EXCPXEVM
Dear TI,
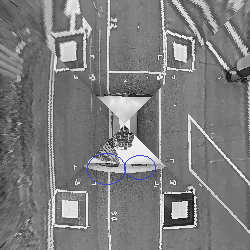
At present, we copy the LENS.bin, CALMAT.bin, and CHARTPOS.bin converted by 3d_calibration_tool (/vision_apps/tools/3d_calibration_tool) to app_srv_camera (/vision_apps/apps/srv_demos/app_srv_camera) for execution. Observing the screen during execution, I found two large black spots on the rear of the car. It was definitely the partial shadow of the license plate on the back of the car. I would like to ask if there is any way to improve this display problem. In addition to physically adjusting the installation angle of the lens, for example, can the values in CALMAT.BIN, CHARTPOS.BIN, and LENS.BIN be adjusted so that the partial shadow of the license plate is not displayed? Or You can adjust the radius that the fisheye lens can display, etc…. grateful!!
Best regard,
George Lin