


Other Parts Discussed in Thread: SK-AM62B,
Hi TI Experts,
Customer is evaluating the performance of our AM64 device driving two servo motors.
The SDK version they applied is SDK9.2 (early released version, I heard that the final SDK9.2 version is still on the way) RT-Linux SDK default image.
They have run Ethercat master & Softmotion module inside the Codesys on A53 cores and drive two servo motors shown below.
The data path is: Codesys -> CPSW2G -> A53 -> Servo Motor
However, the performance is not expected.
The maximum cycle time reached 1313us and the maximum jitter reached 227us shown below.
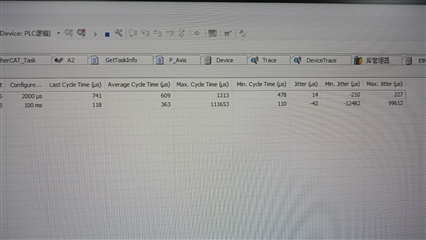
Due to the cycle time and jitter is quite high, it cause data frame loss and the servo motor is stopped finally.
We have searched that we have some benchmark experiments of running AM64x ethercat master connecting to AM24x as slave then driving the servo motors.
For this customer experiment, because they want to achieve implement everything on the AM64x without using AM24x, so the high latency described above has a greater effects on driving the servo motors.
May I know is there any suggestions to improve the performance here please?
Also may I know the upcoming SDK9.2 final version will have a better performance?
Thanks a lot!
Kevin

