


Hi,
We are now trying to synconize the data from different tiovx node to one tiovx node by their timestamps.
For example,
Node A provide lidar feature f1 and the timestamp is t1.
Node B provide camera feature f2 and the timestamp is t2.
And then I tried to compare the t1 and t2, if their difference is accepted by the threshold, f1 and f2 would be the input of Node C and do some calculation in it.
But I found that, In the OpenVX execution model, synchronization is not typically managed using timestamps but through implicit data dependencies. The execution of each node (or operation) in a graph is based on the availability of its input data. This means that if the output of node A is the input to node B, node B will wait until node A has finished executing.
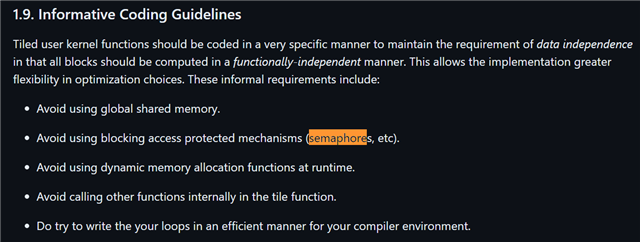
And I also found the descrption below in the openvx doc by the link of https://github.com/KhronosGroup/OpenVX-api-docs/blob/8a9d90b7baabfdcdd6ef567ae3f75615bfad4870/docs/vx_khr_tiling.adoc#L557 which said avoid to use the mechanism like semaphore, etc.
Any suggestions to this Senario?
Best regards,
Feng
