Hello Team,
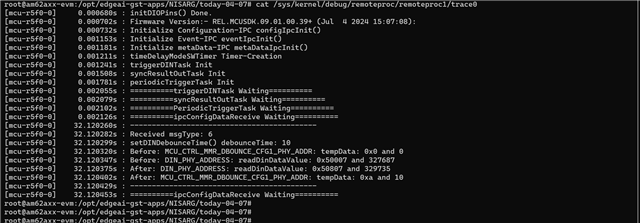
How do we configure the GPIO debounce time in the MCU-R5 (FreeRTOS) firmware? We need to configure debounce time for input-GPIO (MCU-GPIO)
Please provide API details, etc., to configure the debounce time for MCU-GPIO.
Note: We are running applications on the MCU-R5 core, along with Linux running on the A-53 core.
Thanks,
Nisarg