Tool/software:
Downloaded TI's Linux kernel from the following URL and switched to the ti-rt-linux6.6.y-cicd version, using the RT (real-time) version of the Linux kernel.
https://git.ti.com/cgit/ti-linux-kernel/ti-linux-kernel/
Using the following example code from rpmsg_char_simple.c
/*
* rpmsg_char_simple.c
*
* Simple Example application using rpmsg-char library
*
* Copyright (c) 2020 Texas Instruments Incorporated - https://www.ti.com
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include <sys/select.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <stdint.h>
#include <stddef.h>
#include <fcntl.h>
#include <errno.h>
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
#include <time.h>
#include <stdbool.h>
#include <semaphore.h>
#include <linux/rpmsg.h>
#include <ti_rpmsg_char.h>
#define NUM_ITERATIONS 100
#define REMOTE_ENDPT 14
/*
* This test can measure round-trip latencies up to 20 ms
* Latencies measured in microseconds (us)
*/
#define LATENCY_RANGE 20000
int send_msg(int fd, char *msg, int len)
{
int ret = 0;
ret = write(fd, msg, len);
if (ret < 0) {
perror("Can't write to rpmsg endpt device\n");
return -1;
}
return ret;
}
int recv_msg(int fd, int len, char *reply_msg, int *reply_len)
{
int ret = 0;
/* Note: len should be max length of response expected */
ret = read(fd, reply_msg, len);
if (ret < 0) {
perror("Can't read from rpmsg endpt device\n");
return -1;
} else {
*reply_len = ret;
}
return 0;
}
/* single thread communicating with a single endpoint */
int rpmsg_char_ping(int rproc_id, char *dev_name, unsigned int local_endpt, unsigned int remote_endpt,
int num_msgs)
{
int ret = 0;
int i = 0;
int packet_len;
char eptdev_name[64] = { 0 };
/*
* Each RPMsg packet can have up to 496 bytes of data:
* 512 bytes total - 16 byte header = 496
*/
char packet_buf[496] = { 0 };
rpmsg_char_dev_t *rcdev;
int flags = 0;
struct timespec ts_current;
struct timespec ts_end;
/*
* Variables used for latency benchmarks
*/
struct timespec ts_start_test;
struct timespec ts_end_test;
/* latency measured in us */
int latency = 0;
int latencies[LATENCY_RANGE] = {0};
int latency_worst_case = 0;
double latency_average = 0; /* try double, since long long might have overflowed w/ 1Billion+ iterations */
FILE *file_ptr;
/*
* Open the remote rpmsg device identified by dev_name and bind the
* device to a local end-point used for receiving messages from
* remote processor
*/
sprintf(eptdev_name, "rpmsg-char-%d-%d", rproc_id, getpid());
rcdev = rpmsg_char_open(rproc_id, dev_name, local_endpt, remote_endpt,
eptdev_name, flags);
if (!rcdev) {
perror("Can't create an endpoint device");
return -EPERM;
}
printf("Created endpt device %s, fd = %d port = %d\n", eptdev_name,
rcdev->fd, rcdev->endpt);
printf("Exchanging %d messages with rpmsg device %s on rproc id %d ...\n\n",
num_msgs, eptdev_name, rproc_id);
clock_gettime(CLOCK_MONOTONIC, &ts_start_test);
for (i = 0; i < num_msgs; i++) {
memset(packet_buf, 0, sizeof(packet_buf));
/* minimum test: send 1 byte */
sprintf(packet_buf, "h");
/* "normal" test: do the hello message */
//sprintf(packet_buf, "hello there %d!", i);
/* maximum test: send 496 bytes */
//sprintf(packet_buf, "0123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345678901234567890123456789012345");
packet_len = strlen(packet_buf);
/* double-check: is packet_len changing, or fixed at 496? */
//printf("packet_len = %d\n", packet_len);
/* remove prints to speed up the test execution time */
//printf("Sending message #%d: %s\n", i, packet_buf);
clock_gettime(CLOCK_MONOTONIC, &ts_current);
ret = send_msg(rcdev->fd, (char *)packet_buf, packet_len);
if (ret < 0) {
printf("send_msg failed for iteration %d, ret = %d\n", i, ret);
goto out;
}
if (ret != packet_len) {
printf("bytes written does not match send request, ret = %d, packet_len = %d\n",
i, ret);
goto out;
}
ret = recv_msg(rcdev->fd, packet_len, (char *)packet_buf, &packet_len);
clock_gettime(CLOCK_MONOTONIC, &ts_end);
if (ret < 0) {
printf("recv_msg failed for iteration %d, ret = %d\n", i, ret);
goto out;
}
/* latency measured in usec */
latency = (ts_end.tv_nsec - ts_current.tv_nsec) / 1000;
/* if latency is greater than LATENCY_RANGE, throw an error and exit */
if (latency > LATENCY_RANGE) {
printf("latency is too large to be recorded: %d usec\n", latency);
goto out;
}
/* increment the counter for that specific latency measurement */
latencies[latency]++;
/* remove prints to speed up the test execution time */
//printf("Received message #%d: round trip delay(usecs) = %ld\n", i,(ts_end.tv_nsec - ts_current.tv_nsec)/1000);
//printf("%s\n", packet_buf);
}
clock_gettime(CLOCK_MONOTONIC, &ts_end_test);
/* find worst-case latency */
for (i = LATENCY_RANGE - 1; i > 0; i--) {
if (latencies[i] != 0) {
latency_worst_case = i;
break;
}
}
/* WARNING: The average latency calculation is currently being validated */
/* find the average latency */
for (i = LATENCY_RANGE - 1; i > 0; i--) {
/* e.g., if latencies[60] = 17, that means there was a latency of 60us 17 times */
latency_average = latency_average + (latencies[i]*i)/num_msgs;
}
/* old code from using long long instead of double */
/*latency_average = latency_average / num_msgs;*/
/* export the latency measurements to a file */
file_ptr = fopen("histogram.txt", "w");
for (unsigned int i = 0; i < LATENCY_RANGE; i++)
{
fprintf(file_ptr, "%d , ", i);
fprintf(file_ptr, "%d", latencies[i]);
fprintf(file_ptr, "\n");
}
fclose(file_ptr);
printf("\nCommunicated %d messages successfully on %s\n\n",
num_msgs, eptdev_name);
printf("Total execution time for the test: %ld seconds\n",
ts_end_test.tv_sec - ts_start_test.tv_sec);
printf("Average round-trip latency: %f\n", latency_average);
printf("Worst-case round-trip latency: %d\n", latency_worst_case);
printf("Histogram data at histogram.txt\n");
out:
ret = rpmsg_char_close(rcdev);
if (ret < 0)
perror("Can't delete the endpoint device\n");
return ret;
}
void usage()
{
printf("Usage: rpmsg_char_simple [-r <rproc_id>] [-n <num_msgs>] [-d \
<rpmsg_dev_name] [-p <remote_endpt] [-l <local_endpt] \n");
printf("\t\tDefaults: rproc_id: 0 num_msgs: %d rpmsg_dev_name: NULL remote_endpt: %d\n",
NUM_ITERATIONS, REMOTE_ENDPT);
}
int main(int argc, char *argv[])
{
int ret, status, c;
int rproc_id = 0;
int num_msgs = NUM_ITERATIONS;
unsigned int remote_endpt = REMOTE_ENDPT;
unsigned int local_endpt = RPMSG_ADDR_ANY;
char *dev_name = NULL;
while (1) {
c = getopt(argc, argv, "r:n:p:d:l:");
if (c == -1)
break;
switch (c) {
case 'r':
rproc_id = atoi(optarg);
break;
case 'n':
num_msgs = atoi(optarg);
break;
case 'p':
remote_endpt = atoi(optarg);
break;
case 'd':
dev_name = optarg;
break;
case 'l':
local_endpt = atoi(optarg);
break;
default:
usage();
exit(0);
}
}
if (rproc_id < 0 || rproc_id >= RPROC_ID_MAX) {
printf("Invalid rproc id %d, should be less than %d\n",
rproc_id, RPROC_ID_MAX);
usage();
return 1;
}
/* Use auto-detection for SoC */
ret = rpmsg_char_init(NULL);
if (ret) {
printf("rpmsg_char_init failed, ret = %d\n", ret);
return ret;
}
status = rpmsg_char_ping(rproc_id, dev_name, local_endpt, remote_endpt, num_msgs);
rpmsg_char_exit();
if (status < 0) {
printf("TEST STATUS: FAILED\n");
} else {
printf("TEST STATUS: PASSED\n");
}
return 0;
}
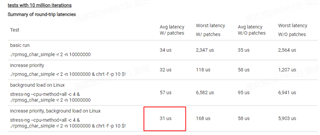
Tested more than 100,000 times and set the priority with the command ./rpmsg_char_simple -r 2 -n 100000 & chrt -f -p 10 $!. The test results are shown in the following figure:
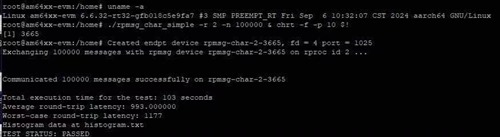
From the figure, it can be seen that the maximum latency is 1177us, which is too high and does not meet our current requirements. Is there room for optimization?