Part Number: TDA4VM
Tool/software:
Hi TI Team,
Recently, I successfully compiled ORB-SLAM3 for the ARM architecture using cross-compilation with the TI SDK Linux toolchain. After transferring all the compiled libraries from my PC to the TDA4VM, I moved the entire ORB-SLAM3 directory, along with the compiled binaries (e.g., `.so` files). I am now able to run ORB-SLAM3 successfully on the TDA4VM, although without visualization, as the Arago Linux distribution on TDA4VM lacks visualization support.
Currently, I can generate camera trajectory files as output from ORB-SLAM3. However, I want to visualize these files directly on the TDA4VM. Additionally, I would like to:
1. Enable visualization on TDA4VM.
2. Determine the FPS of ORB-SLAM3.
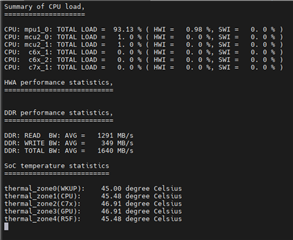
3. Utilize the C6x and C7x DSPs to reduce CPU usage, as the CPU utilization is currently around 95%.
I have attached the performance statistics of TDA4VM while running ORB-SLAM3. As shown in the data, the "C6x & C7x" DSPs are not being utilized.
Could you please guide me on achieving these objectives?
Thank you for your support!
Best regards,
Ramaseshan