


Tool/software:
Hi Expert,
We have an application modified from single cam example. And it has the architecture like this:
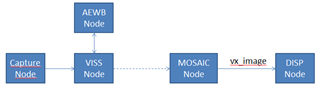
figure1
Now we hope to swith display image if application gets special condition, like this:
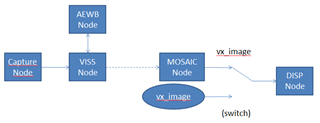
figure2
For this purpose, we replace the vx_image with one vx_object_array (two vx_images included) in figure1. In app_create_graph(), we put MOSAIC node output to first channel in this new vx_object_array. And we load status condition image to 2nd channel in this new vx_object_array. In app_run_graph(), system will check system status and send TIVX_DISPLAY_SELECT_CHANNEL to switch display image. For testing, we set a abnormal stauts, and we expect it show a status image, but it show a flicking result: system display real camera image & black image ony by one with OPENGL error:
(1270) PVR:(Error): PVRSRVDmaBufImportDevMem error 8 (PVRSRV_ERROR_BAD_MAPPING) [ :101 ] EGL: after eglCreateImageKHR() eglError (0x3003) EGL: ERROR: eglCreateImageKHR failed !!! EGL: ERROR: appEglWindowCreateIMG failed !!! GL: after glDrawArrays() glError (0x506) status=0 updateStatus=3 tivxNodeSendCommand(v) : 0 status=0 updateStatus=3 tivxNodeSendCommand(v) : 0 status=0 updateStatus=3 [ 44.045867] PVR_K:(Error): 1266- 1270: PhysmemImportDmaBuf: Failed to get dma-buf from fd (err=-22) [896] (1270) PVR:(Error): PVRSRVDmaBufImportDevMem error 8 (PVRSRV_ERROR_BAD_MAPPING) [ :101 ] EGL: after eglCreateImageKHR() eglError (0x3003) EGL: ERROR: eglCreateImageKHR failed !!! EGL: ERROR: appEglWindowCreateIMG failed !!! GL: after glDrawArrays() glError (0x506) tivxNodeSendCommand(v) : 0 status=0 updateStatus=3 tivxNodeSendCommand(v) : 0 status=0 updateStatus=3[ 44.112551] PVR_K:(Error): 1266- 1270: PhysmemImportDmaBuf: Failed to get dma-buf from fd (err=-22) [896]
Here is our code from file: app_single_cam_main.c
/*
*
* Copyright (c) 2018 Texas Instruments Incorporated
*
* All rights reserved not granted herein.
*
* Limited License.
*
* Texas Instruments Incorporated grants a world-wide, royalty-free, non-exclusive
* license under copyrights and patents it now or hereafter owns or controls to make,
* have made, use, import, offer to sell and sell ("Utilize") this software subject to the
* terms herein. With respect to the foregoing patent license, such license is granted
* solely to the extent that any such patent is necessary to Utilize the software alone.
* The patent license shall not apply to any combinations which include this software,
* other than combinations with devices manufactured by or for TI ("TI Devices").
* No hardware patent is licensed hereunder.
*
* Redistributions must preserve existing copyright notices and reproduce this license
* (including the above copyright notice and the disclaimer and (if applicable) source
* code license limitations below) in the documentation and/or other materials provided
* with the distribution
*
* Redistribution and use in binary form, without modification, are permitted provided
* that the following conditions are met:
*
* * No reverse engineering, decompilation, or disassembly of this software is
* permitted with respect to any software provided in binary form.
*
* * any redistribution and use are licensed by TI for use only with TI Devices.
*
* * Nothing shall obligate TI to provide you with source code for the software
* licensed and provided to you in object code.
*
* If software source code is provided to you, modification and redistribution of the
* source code are permitted provided that the following conditions are met:
*
* * any redistribution and use of the source code, including any resulting derivative
* works, are licensed by TI for use only with TI Devices.
*
* * any redistribution and use of any object code compiled from the source code
* and any resulting derivative works, are licensed by TI for use only with TI Devices.
*
* Neither the name of Texas Instruments Incorporated nor the names of its suppliers
*
* may be used to endorse or promote products derived from this software without
* specific prior written permission.
*
* DISCLAIMER.
*
* THIS SOFTWARE IS PROVIDED BY TI AND TI'S LICENSORS "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED.
* IN NO EVENT SHALL TI AND TI'S LICENSORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY
* OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE
* OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED
* OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "app_single_cam_main.h"
#include <utils/iss/include/app_iss.h>
#include "app_test.h"
#include <TI/tivx_sample.h>
#include <tivx_sample_kernels_priv.h>
//Jeff: for DISPLAY RESOLUTION
#include <app_display.h>
#ifdef A72
#if defined(LINUX)
/*ITT server is supported only in target mode and only on Linux*/
#include <itt_server.h>
#endif
#endif
#define chmask 0x01 // BIT0
static char availableSensorNames[ISS_SENSORS_MAX_SUPPORTED_SENSOR][ISS_SENSORS_MAX_NAME];
static vx_uint8 num_sensors_found;
static IssSensor_CreateParams sensorParams;
//extern unsigned char Sensordirection[ISS_SENSORS_MAX_CHANNEL];
int updateStatus = U_DONOTHING;
#define NUM_CAPT_CHANNELS (4u)
// for detect camera plug or not
//int32_t appCheckCameraPlug (uint32_t channel_mask);
//uint8_t TTE_detectSensor(vx_context context , vx_node capture_node, uint32_t *ch_mask, uint8_t CheckChannelMask);
//check if ok for honda. only support 1, 2, 3, 5
//int is_belong_to_correct_camera_id(int n)
//{
// return (n == 1 || n == 2 || n == 3 || n == 5);
//}
//int updateStatus=U_DONOTHING;
//==========================
/*
* Utility API used to add a graph parameter from a node, node parameter index
*/
void add_graph_parameter_by_node_index(vx_graph graph, vx_node node, vx_uint32 node_parameter_index)
{
vx_parameter parameter = vxGetParameterByIndex(node, node_parameter_index);
vxAddParameterToGraph(graph, parameter);
vxReleaseParameter(¶meter);
}
vx_status app_init(AppObj *obj)
{
vx_status status = VX_SUCCESS;
char* sensor_list[ISS_SENSORS_MAX_SUPPORTED_SENSOR];
vx_uint8 count = 0;
char ch = 0xFF;
vx_uint8 selectedSensor = 0xFF;
vx_uint8 detectedSensors[ISS_SENSORS_MAX_CHANNEL];
#if MULTI_CHANNEL_DISPLAY
vx_image viTemplate;
#endif
#ifdef A72
#if defined(LINUX)
/*ITT server is supported only in target mode and only on Linux*/
status = itt_server_init((void*)obj, (void*)save_debug_images, (void*)appSingleCamUpdateVpacDcc);
if (status != VX_SUCCESS) {
printf("Warning : Failed to initialize ITT server. Live tuning will not work \n");
}
#endif
#endif
/* Setup Sensors */
for (count=0; count<ISS_SENSORS_MAX_CHANNEL; count++) {
detectedSensors[count] = 0xFF;
}
for (count=0; count<ISS_SENSORS_MAX_SUPPORTED_SENSOR; count++) {
sensor_list[count] = NULL;
}
obj->stop_task = 0;
obj->stop_task_done = 0;
obj->selectedCam = 0xFF;
obj->sensor_features_enabled=0;
if (status == VX_SUCCESS) {
obj->context = vxCreateContext();
status = vxGetStatus((vx_reference) obj->context);
}
/* Prepare firmware update panels */
if (status == VX_SUCCESS) {
obj->viMsg = vxCreateImage(obj->context, 3840, 2160, VX_DF_IMAGE_RGB);
status = preload_status_msg(obj);
}
if (status == VX_SUCCESS) {
tivxHwaLoadKernels(obj->context);
tivxImagingLoadKernels(obj->context);
APP_PRINTF("tivxImagingLoadKernels done\n");
tivxSampleLoadKernels(obj->context);
tivxRegisterSampleTargetA72Kernels();
}
/*memset(availableSensorNames, 0, ISS_SENSORS_MAX_SUPPORTED_SENSOR*ISS_SENSORS_MAX_NAME);*/
for (count=0;count<ISS_SENSORS_MAX_SUPPORTED_SENSOR;count++) {
availableSensorNames[count][0] = '\0';
sensor_list[count] = availableSensorNames[count];
}
if (status == VX_SUCCESS) {
status = appEnumerateImageSensor(sensor_list, &num_sensors_found);
}
if (obj->is_interactive) {
selectedSensor = 0xFF;
obj->selectedCam = 0xFF;
while (obj->selectedCam == 0xFF) {
printf("Select camera port index 0-%d : ", ISS_SENSORS_MAX_CHANNEL-1);
ch = getchar();
obj->selectedCam = ch - '0';
if (obj->selectedCam >= ISS_SENSORS_MAX_CHANNEL) {
printf("Invalid entry %c. Please choose between 0 and %d \n", ch, ISS_SENSORS_MAX_CHANNEL-1);
obj->selectedCam = 0xFF;
}
while ((obj->selectedCam != 0xFF) && (selectedSensor > (num_sensors_found-1))) {
printf("%d registered sensor drivers\n", num_sensors_found);
for (count=0;count<num_sensors_found;count++) {
printf("%c : %s \n", count+'a', sensor_list[count]);
}
printf("Select a sensor above or press '0' to autodetect the sensor : ");
ch = getchar();
if (ch == '0') {
uint8_t num_sensors_detected = 0;
uint8_t channel_mask = (1<<obj->selectedCam);
status = appDetectImageSensor(detectedSensors, &num_sensors_detected, channel_mask);
if (VX_SUCCESS == status) {
selectedSensor = detectedSensors[obj->selectedCam];
if (selectedSensor > ISS_SENSORS_MAX_SUPPORTED_SENSOR) {
printf("No sensor detected at port %d. Please select another port \n", obj->selectedCam);
obj->selectedCam = 0xFF;
selectedSensor = 0xFF;
}
} else {
printf("sensor detection at port %d returned error . Please try again \n", obj->selectedCam);
obj->selectedCam = 0xFF;
selectedSensor = 0xFF;
}
} else {
selectedSensor = ch - 'a';
if (selectedSensor > (num_sensors_found-1)) {
printf("Invalid selection %c. Try again \n", ch);
}
}
}
}
obj->ch_mask=obj->selectedCam;
obj->sensor_name = sensor_list[selectedSensor];
printf("Sensor selected : %s\n", obj->sensor_name);
ch = 0xFF;
fflush (stdin);
#if 0
while ((ch != '0') && (ch != '1')) {
fflush (stdin);
printf ("LDC Selection Yes(1)/No(0) : ");
ch = getchar();
}
obj->ldc_enable = ch - '0';
#endif
//Jeff: force to not use ldc
obj->ldc_enable = 0;
} else {
selectedSensor = obj->sensor_sel;
if (selectedSensor > (num_sensors_found-1)) {
printf("Invalid sensor selection %d \n", selectedSensor);
return VX_FAILURE;
}
obj->selectedCam = 0;
obj->sensor_name = sensor_list[selectedSensor];
printf("Sensor selected : %s\n", obj->sensor_name);
}
obj->sensor_wdr_mode = 1;
obj->table_width = LDC_TABLE_WIDTH;
obj->table_height = LDC_TABLE_HEIGHT;
obj->ds_factor = LDC_DS_FACTOR;
#if MULTI_CHANNEL_DISPLAY
/* Create multi-channel output buffers for display */
viTemplate = vxCreateImage(obj->context, DISPLAY_OUT_WIDTH, DISPLAY_OUT_HEIGHT, VX_DF_IMAGE_RGBX);
obj->vaOutput_image = vxCreateObjectArray(
obj->context,
(vx_reference)viTemplate,
NUM_DISP_CHANNEL);
status = vxGetStatus((vx_reference)(obj->vaOutput_image));
APP_PRINTF("\e[1;33m Create image array for display \e[0m: %d\n", status);
vxReleaseImage(&viTemplate);
#endif
/* Display initialization */
memset(&obj->display_params, 0, sizeof(tivx_display_params_t));
obj->display_params.opMode = TIVX_KERNEL_DISPLAY_ZERO_BUFFER_COPY_MODE;
obj->display_params.pipeId = 2;
obj->display_params.outHeight = DISPLAY_OUT_HEIGHT;
obj->display_params.outWidth = DISPLAY_OUT_WIDTH;
obj->display_params.posX = 0;
obj->display_params.posY = 0;
appPerfPointSetName(&obj->total_perf , "TOTAL");
return status;
}
vx_status app_deinit(AppObj *obj) {
vx_status status = VX_FAILURE;
tivxUnRegisterSampleTargetA72Kernels();
tivxSampleUnLoadKernels(obj->context);
tivxHwaUnLoadKernels(obj->context);
APP_PRINTF("tivxHwaUnLoadKernels done\n");
tivxImagingUnLoadKernels(obj->context);
APP_PRINTF("tivxImagingUnLoadKernels done\n");
status = vxReleaseContext(&obj->context);
if (VX_SUCCESS == status) {
APP_PRINTF("vxReleaseContext done\n");
} else {
printf("Error: vxReleaseContext returned 0x%x \n", status);
}
return status;
}
/*
* Graph,
* viss_config
* |
* v
* input_img -> VISS -----> LDC -----> output_img
*
*/
vx_status app_create_graph(AppObj *obj) {
vx_status status = VX_SUCCESS;
int32_t sensor_init_status = -1;
obj->configuration = NULL;
obj->raw = NULL;
obj->y12 = NULL;
obj->uv12_c1 = NULL;
//obj->y8_r8_c2 = NULL;
obj->uv8_g8_c3 = NULL;
obj->s8_b8_c4 = NULL;
obj->histogram = NULL;
obj->h3a_aew_af = NULL;
obj->display_image = NULL;
unsigned int image_width = obj->width_in;
unsigned int image_height = obj->height_in;
tivx_raw_image raw_image = 0;
vx_user_data_object capture_config;
vx_uint8 num_capture_frames = 1;
tivx_capture_params_t local_capture_config;
uint32_t buf_id;
const vx_char capture_user_data_object_name[] = "tivx_capture_params_t";
uint32_t sensor_features_enabled = 0;
uint32_t sensor_features_supported = 0;
uint32_t sensor_wdr_enabled = 0;
uint32_t sensor_exp_control_enabled = 0;
uint32_t sensor_gain_control_enabled = 0;
obj->yuv_cam_input = vx_false_e;
//uint32_t img_fmt;
//vx_image viss_out_image = NULL;
//vx_image ldc_in_image = NULL;
vx_image capt_yuv_image = NULL;
vx_image capt_nv12_image = NULL;
uint8_t channel_mask = (1<<obj->selectedCam);
vx_uint32 params_list_depth = 4;
// if (obj->test_mode == 1) {
// params_list_depth++;
// }
vx_graph_parameter_queue_params_t graph_parameters_queue_params_list[params_list_depth];
printf("Querying %s \n", obj->sensor_name);
memset(&sensorParams, 0, sizeof(sensorParams));
status = appQueryImageSensor(obj->sensor_name, &sensorParams);
//if (VX_SUCCESS != status) {
//printf("appQueryImageSensor returned %d\n", status);
//return status;
// }
if (sensorParams.sensorInfo.raw_params.format[0].pixel_container == VX_DF_IMAGE_UYVY) {
obj->yuv_cam_input = vx_true_e;
printf("YUV Input selected. VISS and AEWB nodes will be bypassed. \n");
}
//Jeff: ask camera id for Honda
uint32_t cameraID = 0;
status = appReadRegImageSensor(obj->sensor_name, channel_mask, 0xA0, &cameraID);
printf("read camera id, return %d, id:%d\n", status, cameraID);
//if (!is_belong_to_correct_camera_id(cameraID))
//{
// cameraID = 1;
// printf("camera id is set to %d\n", cameraID);
//}
obj->CameraID = cameraID;
//img_fmt = sensorParams.sensorInfo.raw_params.format[0].pixel_container;
/*
Check for supported sensor features.
It is upto the application to decide which features should be enabled.
This demo app enables WDR, DCC and 2A if the sensor supports it.
*/
sensor_features_supported = sensorParams.sensorInfo.features;
//Jeff add RGB cam input
if (vx_false_e == obj->yuv_cam_input) {
if (ISS_SENSOR_FEATURE_COMB_COMP_WDR_MODE == (sensor_features_supported & ISS_SENSOR_FEATURE_COMB_COMP_WDR_MODE)) {
APP_PRINTF("WDR mode is supported \n");
sensor_features_enabled |= ISS_SENSOR_FEATURE_COMB_COMP_WDR_MODE;
sensor_wdr_enabled = 1;
obj->sensor_wdr_mode = 1;
} else {
APP_PRINTF("WDR mode is not supported. Defaulting to linear \n");
sensor_features_enabled |= ISS_SENSOR_FEATURE_LINEAR_MODE;
sensor_wdr_enabled = 0;
obj->sensor_wdr_mode = 0;
}
if (ISS_SENSOR_FEATURE_MANUAL_EXPOSURE == (sensor_features_supported & ISS_SENSOR_FEATURE_MANUAL_EXPOSURE)) {
APP_PRINTF("Expsoure control is supported \n");
sensor_features_enabled |= ISS_SENSOR_FEATURE_MANUAL_EXPOSURE;
sensor_exp_control_enabled = 1;
}
if (ISS_SENSOR_FEATURE_MANUAL_GAIN == (sensor_features_supported & ISS_SENSOR_FEATURE_MANUAL_GAIN)) {
APP_PRINTF("Gain control is supported \n");
sensor_features_enabled |= ISS_SENSOR_FEATURE_MANUAL_GAIN;
sensor_gain_control_enabled = 1;
}
if (ISS_SENSOR_FEATURE_CFG_UC1 == (sensor_features_supported & ISS_SENSOR_FEATURE_CFG_UC1)) {
APP_PRINTF("CMS Usecase is supported \n");
sensor_features_enabled |= ISS_SENSOR_FEATURE_CFG_UC1;
}
switch (sensorParams.sensorInfo.aewbMode) {
case ALGORITHMS_ISS_AEWB_MODE_NONE:
obj->aewb_cfg.ae_mode = ALGORITHMS_ISS_AE_DISABLED;
obj->aewb_cfg.awb_mode = ALGORITHMS_ISS_AWB_DISABLED;
break;
case ALGORITHMS_ISS_AEWB_MODE_AWB:
obj->aewb_cfg.ae_mode = ALGORITHMS_ISS_AE_DISABLED;
obj->aewb_cfg.awb_mode = ALGORITHMS_ISS_AWB_AUTO;
break;
case ALGORITHMS_ISS_AEWB_MODE_AE:
obj->aewb_cfg.ae_mode = ALGORITHMS_ISS_AE_AUTO;
obj->aewb_cfg.awb_mode = ALGORITHMS_ISS_AWB_DISABLED;
break;
case ALGORITHMS_ISS_AEWB_MODE_AEWB:
obj->aewb_cfg.ae_mode = ALGORITHMS_ISS_AE_AUTO;
obj->aewb_cfg.awb_mode = ALGORITHMS_ISS_AWB_AUTO;
break;
}
if (obj->aewb_cfg.ae_mode == ALGORITHMS_ISS_AE_DISABLED) {
if (sensor_exp_control_enabled || sensor_gain_control_enabled ) {
obj->aewb_cfg.ae_mode = ALGORITHMS_ISS_AE_MANUAL;
}
}
// keven Add 20250204
sensorParams.sensorInfo.aewbMode = ALGORITHMS_ISS_AEWB_MODE_AEWB;
obj->aewb_cfg.ae_mode = ALGORITHMS_ISS_AE_AUTO;
obj->aewb_cfg.awb_mode = ALGORITHMS_ISS_AWB_AUTO;
// keven Add 20250204
APP_PRINTF("obj->aewb_cfg.ae_mode = %d\n", obj->aewb_cfg.ae_mode);
APP_PRINTF("obj->aewb_cfg.awb_mode = %d\n", obj->aewb_cfg.awb_mode);
}
if (ISS_SENSOR_FEATURE_DCC_SUPPORTED == (sensor_features_supported & ISS_SENSOR_FEATURE_DCC_SUPPORTED)) {
sensor_features_enabled |= ISS_SENSOR_FEATURE_DCC_SUPPORTED;
APP_PRINTF("Sensor DCC is enabled \n");
} else {
APP_PRINTF("Sensor DCC is NOT enabled \n");
}
obj->sensor_features_enabled=sensor_features_enabled;
APP_PRINTF("Sensor width = %d\n", sensorParams.sensorInfo.raw_params.width);
APP_PRINTF("Sensor height = %d\n", sensorParams.sensorInfo.raw_params.height);
APP_PRINTF("Sensor DCC ID = %d\n", sensorParams.dccId);
APP_PRINTF("Sensor Supported Features = 0x%x\n", sensor_features_supported);
APP_PRINTF("Sensor Enabled Features = 0x%x\n", sensor_features_enabled);
sensor_init_status = appInitImageSensor(obj->sensor_name, sensor_features_enabled, channel_mask);/*Mask = 1 for camera # 0*/
if (0 != sensor_init_status) {
/* Not returning failure because application may be waiting for
error/test frame */
printf("Error initializing sensor %s \n", obj->sensor_name);
}
image_width = sensorParams.sensorInfo.raw_params.width;
image_height = sensorParams.sensorInfo.raw_params.height;
obj->cam_dcc_id = sensorParams.dccId;
obj->width_in = image_width;
obj->height_in = image_height;
/*
Assuming same dataformat for all exposures.
This may not be true for staggered HDR. WIll be handled later
for(count = 0;count<raw_params.num_exposures;count++)
{
memcpy(&(raw_params.format[count]), &(sensorProperties.sensorInfo.dataFormat), sizeof(tivx_raw_image_format_t));
}
*/
/*
Sensor driver does not support metadata yet.
*/
APP_PRINTF("Creating graph \n");
obj->graph = vxCreateGraph(obj->context);
if (status == VX_SUCCESS) {
status = vxGetStatus((vx_reference) obj->graph);
}
APP_ASSERT(vx_true_e == tivxIsTargetEnabled(TIVX_TARGET_VPAC_VISS1));
APP_PRINTF("Initializing params for capture node \n");
/* Setting to num buf of capture node */
obj->num_cap_buf = NUM_BUFS;
if (vx_false_e == obj->yuv_cam_input) {
APP_PRINTF("Creating raw image for capture \n");
raw_image = tivxCreateRawImage(obj->context, &sensorParams.sensorInfo.raw_params);
/* allocate Input and Output refs, multiple refs created to allow pipelining of graph */
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++) {
if (status == VX_SUCCESS) {
obj->cap_frames[buf_id] = vxCreateObjectArray(obj->context, (vx_reference)raw_image, num_capture_frames);
status = vxGetStatus((vx_reference) obj->cap_frames[buf_id]);
}
}
} else {
APP_PRINTF("Creating image for capture \n");
capt_yuv_image = vxCreateImage(
obj->context,
sensorParams.sensorInfo.raw_params.width,
sensorParams.sensorInfo.raw_params.height,
//img_fmt
VX_DF_IMAGE_UYVY
);
/* allocate Input and Output refs, multiple refs created to allow pipelining of graph */
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++) {
if (status == VX_SUCCESS) {
obj->cap_frames[buf_id] = vxCreateObjectArray(obj->context, (vx_reference)capt_yuv_image, num_capture_frames);
status = vxGetStatus((vx_reference) obj->cap_frames[buf_id]);
}
}
}
/* Config initialization */
tivx_capture_params_init(&local_capture_config);
local_capture_config.timeout = 33;
local_capture_config.timeoutInitial = 500;
//Jeff, set only for MAX96718F with only one camera
//Jeff: force to use csi1 for handa
obj->use_csi1 = 1;
if (obj->use_csi1 == 1) {
local_capture_config.numInst = 1U;/* Configure both instances */
local_capture_config.numCh = 1U;/* Single cam. Only 1 channel enabled */
local_capture_config.instId[0] = 1; //use CSI1
local_capture_config.instCfg[0].enableCsiv2p0Support = (uint32_t)vx_true_e;
local_capture_config.instCfg[0].numDataLanes = sensorParams.sensorInfo.numDataLanes;
local_capture_config.instCfg[0].laneBandSpeed = sensorParams.sensorInfo.csi_laneBandSpeed;
vx_uint8 id;
for (id = 0; id < local_capture_config.instCfg[0].numDataLanes; id++) {
local_capture_config.instCfg[0].dataLanesMap[id] = id + 1;
}
for (id = 0; id < 4; id++) {
local_capture_config.chVcNum[id] = id;
local_capture_config.chInstMap[id] = 1;
}
} else /* if use_csi1 == 0 */ {
local_capture_config.numInst = 2U;/* Configure both instances */
local_capture_config.numCh = 1U;/* Single cam. Only 1 channel enabled */
{
vx_uint8 ch, id, lane, q;
for (id = 0; id < local_capture_config.numInst; id++) {
local_capture_config.instId[id] = id;
local_capture_config.instCfg[id].enableCsiv2p0Support = (uint32_t)vx_true_e;
local_capture_config.instCfg[id].numDataLanes = sensorParams.sensorInfo.numDataLanes;
local_capture_config.instCfg[id].laneBandSpeed = sensorParams.sensorInfo.csi_laneBandSpeed;
for (lane = 0; lane < local_capture_config.instCfg[id].numDataLanes; lane++) {
local_capture_config.instCfg[id].dataLanesMap[lane] = lane + 1;
}
for (q = 0; q < NUM_CAPT_CHANNELS; q++) {
ch = (NUM_CAPT_CHANNELS-1)* id + q;
local_capture_config.chVcNum[ch] = q;
local_capture_config.chInstMap[ch] = id;
}
}
}
local_capture_config.chInstMap[0] = obj->selectedCam/NUM_CAPT_CHANNELS;
local_capture_config.chVcNum[0] = obj->selectedCam%NUM_CAPT_CHANNELS;
}
capture_config = vxCreateUserDataObject(obj->context, capture_user_data_object_name, sizeof(tivx_capture_params_t), &local_capture_config);
APP_PRINTF("capture_config = 0x%p \n", capture_config);
APP_PRINTF("Creating capture node \n");
obj->capture_node = tivxCaptureNode(
obj->graph,
capture_config,
obj->cap_frames[0]);
APP_PRINTF("obj->capture_node = 0x%p \n", obj->capture_node);
if (status == VX_SUCCESS) {
status = vxReleaseUserDataObject(&capture_config);
}
if (status == VX_SUCCESS) {
status = vxSetNodeTarget(obj->capture_node, VX_TARGET_STRING, TIVX_TARGET_CAPTURE2);
}
capt_nv12_image = vxCreateImage(obj->context, image_width, image_height, VX_DF_IMAGE_NV12);
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++) {
obj->mosaic_frames[buf_id] = vxCreateObjectArray(obj->context, (vx_reference)capt_nv12_image, 4);
//obj->y8_r8_c2[buf_id] = (vx_image) vxGetObjectArrayItem(obj->mosaic_frames[buf_id], 0);
}
vxReleaseImage(&capt_nv12_image);
if (vx_false_e == obj->yuv_cam_input) {
obj->raw = (tivx_raw_image)vxGetObjectArrayItem(obj->cap_frames[0], 0);
if (status == VX_SUCCESS) {
status = tivxReleaseRawImage(&raw_image);
}
#ifdef _APP_DEBUG_
obj->fs_test_raw_image = tivxCreateRawImage(obj->context, &(sensorParams.sensorInfo.raw_params));
if (NULL != obj->fs_test_raw_image) {
if (status == VX_SUCCESS) {
status = read_test_image_raw(NULL, obj->fs_test_raw_image, obj->test_mode);
} else {
status = tivxReleaseRawImage(&obj->fs_test_raw_image);
obj->fs_test_raw_image = NULL;
}
}
#endif //_APP_DEBUG_
status = app_create_viss(obj, sensor_wdr_enabled);
if (VX_SUCCESS == status) {
vxSetNodeTarget(obj->node_viss, VX_TARGET_STRING, TIVX_TARGET_VPAC_VISS1);
//tivxSetNodeParameterNumBufByIndex(obj->node_viss, 6u, obj->num_cap_buf);
} else {
printf("app_create_viss failed \n");
return VX_FAILURE;
}
status = app_create_aewb(obj, sensor_wdr_enabled);
if (VX_SUCCESS != status) {
printf("app_create_aewb failed \n");
return VX_FAILURE;
}
//viss_out_image = obj->y8_r8_c2;
//ldc_in_image = viss_out_image;
} else {
obj->capt_yuv_image = (vx_image)vxGetObjectArrayItem(obj->cap_frames[0], 0);
//ldc_in_image = obj->capt_yuv_image;
vxReleaseImage(&capt_yuv_image);
}
if (1)
{
obj->fake_yuv_image = vxCreateImage(
obj->context,
sensorParams.sensorInfo.raw_params.width,
sensorParams.sensorInfo.raw_params.height,
VX_DF_IMAGE_NV12);
if (NULL != obj->fake_yuv_image)
{
status = load_input_image(
obj,
obj->fake_yuv_image,
sensorParams.sensorInfo.raw_params.width,
sensorParams.sensorInfo.raw_params.height);
}
}
//add opengl mosaic node for Honda
memset(&obj->opengl_params, 0, sizeof(tivx_opengl_mosaic_params_t));
//if (obj->showFisheye)
obj->opengl_params.renderType = TIVX_KERNEL_OPENGL_MOSAIC_TYPE_1x1; // show Fisheye
//else
//obj->opengl_params.renderType = TIVX_KERNEL_OPENGL_MOSAIC_TYPE_VIEW; // show realCamera
switch(cameraID)
{
case 1:
default:
obj->opengl_params.rect = obj->camera1rect;
break;
case 2:
obj->opengl_params.rect = obj->camera2rect;
break;
case 3:
obj->opengl_params.rect = obj->camera3rect;
break;
case 5:
obj->opengl_params.rect = obj->camera5rect;
break;
}
obj->opengl_params.location = obj->host_location;
obj->opengl_params.camerID = cameraID;
obj->opengl_param_obj = vxCreateUserDataObject(obj->context, "tivx_opengl_mosaic_params_t", sizeof(tivx_opengl_mosaic_params_t), &obj->opengl_params);
status = vxGetStatus((vx_reference) obj->opengl_param_obj);
#if 0
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++)
obj->mosaic_out_image[buf_id] = vxCreateImage(
obj->context,
obj->display_params.outWidth,
obj->display_params.outHeight, VX_DF_IMAGE_RGBX);
#endif
obj->openglNode = tivxOpenglMosaicNode(
obj->graph,
obj->opengl_param_obj,
obj->mosaic_frames[0],
//obj->mosaic_out_image[0]);
(vx_image)vxGetObjectArrayItem((vx_object_array)obj->vaOutput_image, 0));
if (status == VX_SUCCESS) {
status = vxReleaseUserDataObject(&obj->opengl_param_obj);
}
if (status == VX_SUCCESS) {
status = vxSetNodeTarget(obj->openglNode, VX_TARGET_STRING, TIVX_TARGET_A72_0);
}
//reset display_image to mosaic result image
//obj->display_image = obj->mosaic_out_image[0];
obj->display_image = (vx_image)vxGetObjectArrayItem((vx_object_array)obj->vaOutput_image, 0); //0);
if (NULL == obj->display_image) {
printf("Error : Display input is uninitialized \n");
return VX_FAILURE;
} else {
#if ENABLE_DISPLAY
obj->display_params.posX = 0;
obj->display_params.posY = 0;
obj->display_param_obj = vxCreateUserDataObject(obj->context, "tivx_display_params_t", sizeof(tivx_display_params_t), &obj->display_params);
obj->displayNode = tivxDisplayNode(
obj->graph,
obj->display_param_obj,
obj->display_image);
#endif
}
#if ENABLE_DISPLAY
if (status == VX_SUCCESS) {
status = vxSetNodeTarget(obj->displayNode, VX_TARGET_STRING, TIVX_TARGET_DISPLAY1);
APP_PRINTF("Display Set Target done\n");
}
#endif
int graph_parameter_num = 0;
/* input @ node index 1, becomes graph parameter 0 */
add_graph_parameter_by_node_index(obj->graph, obj->capture_node, 1);
/* set graph schedule config such that graph parameter @ index 0 is enqueuable */
graph_parameters_queue_params_list[graph_parameter_num].graph_parameter_index = graph_parameter_num;
graph_parameters_queue_params_list[graph_parameter_num].refs_list_size = obj->num_cap_buf;
graph_parameters_queue_params_list[graph_parameter_num].refs_list = (vx_reference*)&(obj->cap_frames[0]);
obj->graph_parameter_num_capt = graph_parameter_num;
graph_parameter_num++;
add_graph_parameter_by_node_index(obj->graph, obj->openglNode, 1);
graph_parameters_queue_params_list[graph_parameter_num].graph_parameter_index = graph_parameter_num;
graph_parameters_queue_params_list[graph_parameter_num].refs_list_size = obj->num_cap_buf;
graph_parameters_queue_params_list[graph_parameter_num].refs_list = (vx_reference*)&(obj->mosaic_frames[0]);
obj->graph_parameter_num_mosaic = graph_parameter_num;
graph_parameter_num++;
#if 0
//firmware update
add_graph_parameter_by_node_index(obj->graph, obj->openglNode, 2);
graph_parameters_queue_params_list[graph_parameter_num].graph_parameter_index = graph_parameter_num;
graph_parameters_queue_params_list[graph_parameter_num].refs_list_size = obj->num_cap_buf;
graph_parameters_queue_params_list[graph_parameter_num].refs_list = (vx_reference*)&(obj->mosaic_out_image[0]);
obj->graph_parameter_num_outsaic = graph_parameter_num;
graph_parameter_num++;
#endif
if (vx_false_e == obj->yuv_cam_input) {
add_graph_parameter_by_node_index(obj->graph, obj->node_viss, 6);
graph_parameters_queue_params_list[graph_parameter_num].graph_parameter_index = graph_parameter_num;
graph_parameters_queue_params_list[graph_parameter_num].refs_list_size = obj->num_cap_buf;
graph_parameters_queue_params_list[graph_parameter_num].refs_list = (vx_reference*)&(obj->y8_r8_c2[0]);
obj->graph_parameter_num_viss = graph_parameter_num;
graph_parameter_num++;
}
if (obj->test_mode == 1) {
#if ENABLE_DISPLAYf
add_graph_parameter_by_node_index(obj->graph, obj->displayNode, 1);
#endif
/* set graph schedule config such that graph parameter @ index 0 is enqueuable */
graph_parameters_queue_params_list[graph_parameter_num].graph_parameter_index = graph_parameter_num;
graph_parameters_queue_params_list[graph_parameter_num].refs_list_size = 1;
graph_parameters_queue_params_list[graph_parameter_num].refs_list = (vx_reference*)&(obj->display_image);
obj->graph_parameter_num_display = graph_parameter_num;
graph_parameter_num++;
}
if (status == VX_SUCCESS) {
status = tivxSetGraphPipelineDepth(obj->graph, obj->num_cap_buf);
}
/* Schedule mode auto is used, here we dont need to call vxScheduleGraph
* Graph gets scheduled automatically as refs are enqueued to it
*/
if (status == VX_SUCCESS) {
status = vxSetGraphScheduleConfig(obj->graph,
VX_GRAPH_SCHEDULE_MODE_QUEUE_AUTO,
graph_parameter_num,
graph_parameters_queue_params_list
);
}
APP_PRINTF("vxSetGraphScheduleConfig done\n");
if (status == VX_SUCCESS) {
status = vxVerifyGraph(obj->graph);
}
if (status == VX_SUCCESS) {
status = tivxExportGraphToDot(obj->graph, ".", "single_cam_graph");
}
#ifdef _APP_DEBUG_
if (vx_false_e == obj->yuv_cam_input) {
if ((NULL != obj->fs_test_raw_image) && (NULL != obj->capture_node) && (status == VX_SUCCESS)) {
status = app_send_test_frame(obj->capture_node, obj->fs_test_raw_image);
}
}
#endif //_APP_DEBUG_
APP_PRINTF("app_create_graph exiting\n");
return status;
}
vx_status app_delete_graph(AppObj *obj) {
uint32_t buf_id;
vx_status status = VX_SUCCESS;
if (obj->capture_node) {
APP_PRINTF("releasing capture node\n");
status |= vxReleaseNode(&obj->capture_node);
}
if (obj->node_viss) {
APP_PRINTF("releasing node_viss\n");
status |= vxReleaseNode(&obj->node_viss);
}
if (obj->node_aewb) {
APP_PRINTF("releasing node_aewb\n");
status |= vxReleaseNode(&obj->node_aewb);
}
#if ENABLE_DISPLAY
if (obj->displayNode) {
APP_PRINTF("releasing displayNode\n");
status |= vxReleaseNode(&obj->displayNode);
}
#endif
if (obj->openglNode) {
APP_PRINTF("releasing openglNode\n");
status |= vxReleaseNode(&obj->openglNode);
}
/* firmware update */
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++) {
if (obj->mosaic_out_image[buf_id]) {
APP_PRINTF("releasing mosaic_frames # %d\n", buf_id);
status |= vxReleaseImage(&(obj->mosaic_out_image[buf_id]));
}
}
status |= tivxReleaseRawImage(&obj->raw);
APP_PRINTF("releasing raw image done\n");
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++) {
if (obj->cap_frames[buf_id]) {
APP_PRINTF("releasing cap_frame # %d\n", buf_id);
status |= vxReleaseObjectArray(&(obj->cap_frames[buf_id]));
}
}
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++) {
if (obj->mosaic_frames[buf_id]) {
APP_PRINTF("releasing mosaic_frames # %d\n", buf_id);
status |= vxReleaseObjectArray(&(obj->mosaic_frames[buf_id]));
}
}
for (buf_id=0; buf_id<obj->num_viss_out_buf; buf_id++) {
if (obj->viss_out_luma[buf_id]) {
APP_PRINTF("releasing y8 buffer # %d\n", buf_id);
status |= vxReleaseImage(&(obj->viss_out_luma[buf_id]));
}
}
#if MULTI_CHANNEL_DISPLAY
if (obj->vaOutput_image)
status |= vxReleaseObjectArray(&obj->vaOutput_image);
#endif
if (obj->capt_yuv_image) {
APP_PRINTF("releasing capt_yuv_image\n");
status |= vxReleaseImage(&obj->capt_yuv_image);
}
if (obj->y12) {
APP_PRINTF("releasing y12\n");
status |= vxReleaseImage(&obj->y12);
}
if (obj->uv12_c1) {
APP_PRINTF("releasing uv12_c1\n");
status |= vxReleaseImage(&obj->uv12_c1);
}
if (obj->s8_b8_c4) {
APP_PRINTF("releasing s8_b8_c4\n");
status |= vxReleaseImage(&obj->s8_b8_c4);
}
if (obj->y8_r8_c2[0]) {
APP_PRINTF("releasing y8_r8_c2\n");
for (int i=0; i<obj->num_cap_buf; i++)
status |= vxReleaseImage(&obj->y8_r8_c2[i]);
}
if (obj->uv8_g8_c3) {
APP_PRINTF("releasing uv8_g8_c3\n");
status |= vxReleaseImage(&obj->uv8_g8_c3);
}
if (obj->histogram) {
APP_PRINTF("releasing histogram\n");
status |= vxReleaseDistribution(&obj->histogram);
}
if (obj->configuration) {
APP_PRINTF("releasing configuration\n");
status |= vxReleaseUserDataObject(&obj->configuration);
}
if (obj->ae_awb_result) {
status |= vxReleaseUserDataObject(&obj->ae_awb_result);
APP_PRINTF("releasing ae_awb_result done\n");
}
if (obj->h3a_aew_af) {
APP_PRINTF("releasing h3a_aew_af\n");
status |= vxReleaseUserDataObject(&obj->h3a_aew_af);
}
if (obj->aewb_config) {
APP_PRINTF("releasing aewb_config\n");
status |= vxReleaseUserDataObject(&obj->aewb_config);
}
if (obj->dcc_param_viss) {
APP_PRINTF("releasing VISS DCC Data Object\n");
status |= vxReleaseUserDataObject(&obj->dcc_param_viss);
}
if (obj->display_param_obj) {
APP_PRINTF("releasing Display Param Data Object\n");
status |= vxReleaseUserDataObject(&obj->display_param_obj);
}
if (obj->dcc_param_2a) {
APP_PRINTF("releasing 2A DCC Data Object\n");
status |= vxReleaseUserDataObject(&obj->dcc_param_2a);
}
if (obj->dcc_param_ldc) {
APP_PRINTF("releasing LDC DCC Data Object\n");
status |= vxReleaseUserDataObject(&obj->dcc_param_ldc);
}
if (obj->ldc_enable) {
if (obj->mesh_img) {
APP_PRINTF("releasing LDC Mesh Image \n");
status |= vxReleaseImage(&obj->mesh_img);
}
if (obj->ldc_out) {
APP_PRINTF("releasing LDC Output Image \n");
status |= vxReleaseImage(&obj->ldc_out);
}
if (obj->mesh_params_obj) {
APP_PRINTF("releasing LDC Mesh Parameters Object\n");
status |= vxReleaseUserDataObject(&obj->mesh_params_obj);
}
if (obj->ldc_param_obj) {
APP_PRINTF("releasing LDC Parameters Object\n");
status |= vxReleaseUserDataObject(&obj->ldc_param_obj);
}
if (obj->region_params_obj) {
APP_PRINTF("releasing LDC Region Parameters Object\n");
status |= vxReleaseUserDataObject(&obj->region_params_obj);
}
if (obj->node_ldc) {
APP_PRINTF("releasing LDC Node \n");
status |= vxReleaseNode(&obj->node_ldc);
}
}
#ifdef _APP_DEBUG_
if (obj->fs_test_raw_image) {
APP_PRINTF("releasing test raw image buffer # %d\n", buf_id);
status |= tivxReleaseRawImage(&obj->fs_test_raw_image);
}
if (obj->fake_yuv_image) {
APP_PRINTF("releasing test yuv image buffer # %d\n", buf_id);
status |= vxReleaseImage(&obj->fake_yuv_image);
}
#endif
APP_PRINTF("Before releasing graph. status=%d\n", status);
status |= vxReleaseGraph(&obj->graph);
APP_PRINTF("releasing graph done\n");
return status;
}
vx_status app_init_sensor_plug(AppObj *obj, char *objName) // for sensor re-plug
{
vx_status status = VX_SUCCESS;
int32_t sensor_init_status = VX_FAILURE;
uint8_t ch_mask = obj->ch_mask;
sensor_init_status = appInitImageSensor(obj->sensor_name, obj->sensor_features_enabled, ch_mask);
if (sensor_init_status) {
// printf("[casperdebug]---------> status =%d , %s , %d \n",sensor_init_status,__FUNCTION__,__LINE__);
printf("Error initializing sensor %s \n", obj->sensor_name);
status = VX_FAILURE;
}
// else printf("[casperdebug]---------> ch_mask =%d , %s , %d \n",ch_mask,__FUNCTION__,__LINE__);
return status;
}
vx_status app_run_graph(AppObj *obj) {
vx_status status = VX_SUCCESS;
vx_uint32 i;
vx_uint32 frm_loop_cnt;
//static uint32_t DetSDCardCnt;
uint32_t buf_id;
uint32_t num_refs_capture;
vx_object_array out_capture_frames;
vx_object_array in_mosaic_frames;
//vx_image out_mosaic_image;
vx_image out_viss_image;
vx_reference vrRefs[1];
tivx_display_select_channel_params_t stChannel_prms;
vx_user_data_object voSwitch_ch_obj;
updateStatus=3;
printf("========================updateStatus=3=======================\n");
#if 0
static uint32_t DetSDCardCnt;
#endif
int graph_parameter_num = 0;
uint64_t cameraDetect=0;
uint8_t channel_mask = (1<<obj->selectedCam);
if (NULL == obj->sensor_name) {
printf("sensor name is NULL \n");
return VX_FAILURE;
}
status = appStartImageSensor(obj->sensor_name, channel_mask);
if (status < 0) {
printf("Failed to start sensor %s \n", obj->sensor_name);
if (NULL != obj->fs_test_raw_image) {
printf("Defaulting to file test mode \n");
status = 0;
}
}
for (buf_id=0; buf_id<obj->num_cap_buf; buf_id++) {
if (status == VX_SUCCESS) {
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_capt, (vx_reference*)&(obj->cap_frames[buf_id]), 1);
}
if ((status == VX_SUCCESS) && (obj->yuv_cam_input == vx_false_e)) {
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_viss, (vx_reference*)&(obj->y8_r8_c2[buf_id]), 1);
}
if (status == VX_SUCCESS) {
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_mosaic, (vx_reference*)&(obj->mosaic_frames[buf_id]), 1);
}
#if 0
/* firmware update */
if (status == VX_SUCCESS) {
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_outsaic, (vx_reference*)&(obj->mosaic_out_image[buf_id]), 1);
}
#endif
#if 0
/* in order for the graph to finish execution, the
display still needs to be enqueued 4 times for testing */
if ((status == VX_SUCCESS) && (obj->test_mode == 1)) {
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_display, (vx_reference*)&(obj->display_image), 1);
}
#endif
}
/*
The application reads and processes the same image "frm_loop_cnt" times
The output may change because on VISS, parameters are updated every frame based on AEWB results
AEWB result is avaialble after 1 frame and is applied after 2 frames
Therefore, first 2 output images will have wrong colors
*/
frm_loop_cnt = obj->num_frames_to_run;
frm_loop_cnt += obj->num_cap_buf;
if (obj->is_interactive) {
/* in interactive mode loop for ever */
frm_loop_cnt = 0xFFFFFFFF;
}
#ifdef A72
#if defined(LINUX)
if (obj->node_ldc != NULL) {
appDccUpdatefromFS(obj->sensor_name, obj->sensor_wdr_mode,
obj->node_aewb, 0,
obj->node_viss, 0,
obj->node_ldc, 0,
obj->context);
}
#endif
#endif
for (i=0; i<frm_loop_cnt; i++) {
vx_image test_image;
appPerfPointBegin(&obj->total_perf);
//Jeff: disable for testing
#if 0 //fa
DetSDCardCnt++;
if (DetSDCardCnt > 20)
{
app_DetSDCard(obj);
DetSDCardCnt=0;
}
#endif
if (status == VX_SUCCESS) {
status = vxGraphParameterDequeueDoneRef(obj->graph, obj->graph_parameter_num_capt, (vx_reference*)&out_capture_frames, 1, &num_refs_capture);
}
if ((status == VX_SUCCESS) && (obj->yuv_cam_input == vx_false_e)) {
status = vxGraphParameterDequeueDoneRef(obj->graph, obj->graph_parameter_num_viss, (vx_reference*)&out_viss_image, 1, &num_refs_capture);
}
if (status == VX_SUCCESS) {
status = vxGraphParameterDequeueDoneRef(obj->graph, obj->graph_parameter_num_mosaic, (vx_reference*)&in_mosaic_frames, 1, &num_refs_capture);
}
#if 0
/* firmware update */
if (status == VX_SUCCESS) {
status = vxGraphParameterDequeueDoneRef(obj->graph, obj->graph_parameter_num_outsaic, (vx_reference*)&out_mosaic_image, 1, &num_refs_capture);
}
#endif
printf("status=%d updateStatus=%d\n", status, updateStatus);
//updateStatus=0;
#if MULTI_CHANNEL_DISPLAY
if ((status == VX_SUCCESS) && (U_DONOTHING == updateStatus))
//if (0)
{
stChannel_prms.active_channel_id = 0;
voSwitch_ch_obj = vxCreateUserDataObject(
obj->context,
"tivx_display_select_channel_params_t",
sizeof(tivx_display_select_channel_params_t),
&stChannel_prms);
status = vxGetStatus((vx_reference) voSwitch_ch_obj);
if (status == VX_SUCCESS)
{
vrRefs[0] = (vx_reference)voSwitch_ch_obj;
vxCopyUserDataObject(
voSwitch_ch_obj,
0,
sizeof(tivx_display_select_channel_params_t),
&stChannel_prms,
VX_WRITE_ONLY,
VX_MEMORY_TYPE_HOST);
status = tivxNodeSendCommand(obj->displayNode, 0, TIVX_DISPLAY_SELECT_CHANNEL, vrRefs, 1u);
APP_PRINTF("\e[1;33m tivxNodeSendCommand(a) : %d \e[0m\n", status);
vxReleaseUserDataObject(&voSwitch_ch_obj);
} else {
APP_PRINTF("\e[1;33m vxCreateUserDataObject returns %d. \e[0m\n", status);
}
}
if ((status == VX_SUCCESS) && (U_DONOTHING != updateStatus))
//if (1)
{
//status = vxGraphParameterDequeueDoneRef(obj->graph, obj->graph_parameter_num_display, (vx_reference*)vxGetObjectArrayItem((vx_object_array)obj->vaOutput_image, 1), 1, &num_refs_capture);
stChannel_prms.active_channel_id = 1;
voSwitch_ch_obj = vxCreateUserDataObject(
obj->context,
"tivx_display_select_channel_params_t",
sizeof(tivx_display_select_channel_params_t),
&stChannel_prms);
status = vxGetStatus((vx_reference) voSwitch_ch_obj);
if (status == VX_SUCCESS)
{
vrRefs[0] = (vx_reference)voSwitch_ch_obj;
vxCopyUserDataObject(
voSwitch_ch_obj,
0,
sizeof(tivx_display_select_channel_params_t),
&stChannel_prms,
VX_WRITE_ONLY,
VX_MEMORY_TYPE_HOST);
status = tivxNodeSendCommand(obj->displayNode, 0, TIVX_DISPLAY_SELECT_CHANNEL, vrRefs, 1u);
APP_PRINTF("\e[1;33m tivxNodeSendCommand(v) : %d \e[0m\n", status);
vxReleaseUserDataObject(&voSwitch_ch_obj);
} else {
APP_PRINTF("\e[1;33m vxCreateUserDataObject returns %d. \e[0m\n", status);
}
}
#endif
#if 1
if ((status == VX_SUCCESS) && (obj->test_mode == 1)) {
status = vxGraphParameterDequeueDoneRef(obj->graph, obj->graph_parameter_num_display, (vx_reference*)&test_image, 1, &num_refs_capture);
}
if ((obj->test_mode == 1) && (i > TEST_BUFFER) && (status == VX_SUCCESS)) {
vx_uint32 actual_checksum = 0;
if (app_test_check_image(test_image, checksums_expected[obj->sensor_sel][0], &actual_checksum) == vx_false_e) {
test_result = vx_false_e;
}
populate_gatherer(obj->sensor_sel, 0, actual_checksum);
}
// if (i % 100 == 0)
// APP_PRINTF(" i %d...\n", i);
if ((status == VX_SUCCESS) && (obj->test_mode == 1)) {
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_display, (vx_reference*)&test_image, 1);
}
#endif
if (status == VX_SUCCESS && obj->yuv_cam_input == vx_false_e) { // RAW format
vx_image dst_img = (vx_image)vxGetObjectArrayItem(in_mosaic_frames, 0);
if (obj->fakeImg == 0) // from camera
nv12_copy_to(out_viss_image, dst_img);
else // from static image
nv12_copy_to(obj->fake_yuv_image, dst_img);
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_mosaic, (vx_reference*)&in_mosaic_frames, 1);
vxReleaseImage(&dst_img);
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_viss, (vx_reference*)&out_viss_image, 1);
}
if (status == VX_SUCCESS && obj->yuv_cam_input == vx_true_e) { // YUV format
vx_image dst_img = (vx_image)vxGetObjectArrayItem(in_mosaic_frames, 0);
vx_image src_img = (vx_image)vxGetObjectArrayItem(out_capture_frames, 0);
vxuColorConvert(obj->context, src_img, dst_img);
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_mosaic, (vx_reference*)&in_mosaic_frames, 1);
vxReleaseImage(&dst_img);
vxReleaseImage(&src_img);
}
#if 0
#if MULTI_CHANNEL_DISPLAY
if ((status == VX_SUCCESS) && (U_DONOTHING != updateStatus))
{
change_status_msg(obj, updateStatus);
vx_image dst_img = (vx_image)vxGetObjectArrayItem((vx_object_array)obj->vaOutput_image, 1);
vxuColorConvert(obj->context, obj->viMsg, dst_img);
//status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_display, (vx_reference*)vxGetObjectArrayItem((vx_object_array)obj->vaOutput_image, 1), 1);
printf("20250227 status=%d\n", status);
vxReleaseImage(&dst_img);
}
#endif
#endif
#if 0
/* firmware update */
if (status == VX_SUCCESS) { /* if do nothing, directly set orig to dest */
//vx_image dst_img = out_mosaic_image;
//vx_image src_img = out_mosaic_image;
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_outsaic, (vx_reference*)&out_mosaic_image, 1);
//vxReleaseImage(&dst_img);
//vxReleaseImage(&src_img);
}
#endif
if (status == VX_SUCCESS) {
status = vxGraphParameterEnqueueReadyRef(obj->graph, obj->graph_parameter_num_capt, (vx_reference*)&out_capture_frames, 1);
}
graph_parameter_num++;
// for detect camera plug or not
if (cameraDetect>0 && (cameraDetect % 60 ==0)) {
#if 0
if (TTE_detectSensor(obj->context,obj->capture_node,&(obj->ch_mask),chmask) != chmask)
{
if (appCheckCameraPlug( obj->ch_mask) == 0)
{
status = app_init_sensor_plug(obj, "sensor_obj");
if (status == VX_SUCCESS)
appStartImageSensor(obj->sensor_name,obj->ch_mask);
else
printf("Config failed\n");
}
}
#endif
}
cameraDetect++;
appPerfPointEnd(&obj->total_perf);
if ((obj->stop_task) || (status != VX_SUCCESS)) {
break;
}
}
if (status == VX_SUCCESS) {
status = vxWaitGraph(obj->graph);
}
/* Dequeue buf for pipe down */
#if 0
for (buf_id=0; buf_id<obj->num_cap_buf-2; buf_id++) {
APP_PRINTF(" Dequeuing capture # %d...\n", buf_id);
graph_parameter_num = 0;
vxGraphParameterDequeueDoneRef(obj->graph, graph_parameter_num, (vx_reference*)&out_capture_frames, 1, &num_refs_capture);
graph_parameter_num++;
}
#endif
if (status == VX_SUCCESS) {
status = appStopImageSensor(obj->sensor_name, channel_mask);
}
return status;
}
static void app_run_task(void *app_var) {
AppObj *obj = (AppObj *)app_var;
appPerfStatsCpuLoadResetAll();
app_run_graph(obj);
obj->stop_task_done = 1;
}
static int32_t app_run_task_create(AppObj *obj) {
tivx_task_create_params_t params;
int32_t status;
tivxTaskSetDefaultCreateParams(¶ms);
params.task_main = app_run_task;
params.app_var = obj;
obj->stop_task_done = 0;
obj->stop_task = 0;
status = tivxTaskCreate(&obj->task, ¶ms);
return status;
}
static void app_run_task_delete(AppObj *obj) {
while (obj->stop_task_done==0) {
tivxTaskWaitMsecs(100);
}
tivxTaskDelete(&obj->task);
}
static char menu[] = {
"\n"
"\n =========================="
"\n Demo : Single Camera w/ 2A"
"\n =========================="
"\n"
"\n p: Print performance statistics"
"\n"
"\n s: Save Sensor RAW, VISS Output and H3A output images to File System"
"\n"
"\n e: Export performance statistics"
#ifdef A72
#if defined(LINUX)
"\n"
"\n u: Update DCC from File System"
"\n"
"\n"
#endif
#endif
"\n x: Exit"
"\n"
"\n Enter Choice: "
};
static vx_status app_run_graph_interactive(AppObj *obj) {
vx_status status;
uint32_t done = 0;
char ch;
FILE *fp;
app_perf_point_t *perf_arr[1];
uint8_t channel_mask = (1<<obj->selectedCam);
status = app_run_task_create(obj);
if (status) {
printf("ERROR: Unable to create task\n");
} else {
appPerfStatsResetAll();
while (!done && (status == VX_SUCCESS)) {
printf(menu);
ch = getchar();
printf("\n");
switch(ch) {
case 'p':
appPerfStatsPrintAll();
status = tivx_utils_graph_perf_print(obj->graph);
appPerfPointPrint(&obj->total_perf);
printf("\n");
appPerfPointPrintFPS(&obj->total_perf);
appPerfPointReset(&obj->total_perf);
printf("\n");
break;
case 's':
save_debug_images(obj);
break;
case 'e':
perf_arr[0] = &obj->total_perf;
fp = appPerfStatsExportOpenFile(".", "basic_demos_app_single_cam");
if (NULL != fp)
{
appPerfStatsExportAll(fp, perf_arr, 1);
status = tivx_utils_graph_perf_export(fp, obj->graph);
appPerfStatsExportCloseFile(fp);
appPerfStatsResetAll();
} else {
printf("fp is null\n");
}
break;
#ifdef A72
#if defined(LINUX)
case 'u':
appDccUpdatefromFS(obj->sensor_name, obj->sensor_wdr_mode,
obj->node_aewb, 0,
obj->node_viss, 0,
obj->node_ldc, 0,
obj->context);
break;
#endif
#endif
case 'x':
obj->stop_task = 1;
done = 1;
break;
default:
printf("Unsupported command %c\n", ch);
break;
}
fflush (stdin);
}
app_run_task_delete(obj);
}
if (status == VX_SUCCESS) {
status = appStopImageSensor(obj->sensor_name, channel_mask);
}
return status;
}
static void app_show_usage(int argc, char* argv[]) {
printf("\n");
printf(" Single Camera Demo - (c) Texas Instruments 2019\n");
printf(" ========================================================\n");
printf("\n");
printf(" Usage,\n");
printf(" %s --cfg <config file> --use_csi1 --fake --num_frames_to_run <frames> --showFisheye\n", argv[0]);
printf("\n");
}
#ifdef A72
#if defined(LINUX)
int appSingleCamUpdateVpacDcc(AppObj *obj, uint8_t* dcc_buf, uint32_t dcc_buf_size)
{
int32_t status = 0;
status = appUpdateVpacDcc(dcc_buf, dcc_buf_size, obj->context,
obj->node_viss, 0,
obj->node_aewb, 0,
obj->node_ldc, 0
);
return status;
}
#endif
#endif
static void app_parse_cfg_file(AppObj *obj, char *cfg_file_name) {
FILE *fp = fopen(cfg_file_name, "r");
char line_str[1024];
char *token;
BOOL camera1Inited = FALSE;
BOOL camera2Inited = FALSE;
BOOL camera3Inited = FALSE;
BOOL camera5Inited = FALSE;
int start_x = 0, start_y = 0, end_x = 0, end_y = 0;
if (fp==NULL) {
printf("# ERROR: Unable to open config file [%s]. Switching to interactive mode\n", cfg_file_name);
obj->is_interactive = 1;
} else {
while (fgets(line_str, sizeof(line_str), fp)!=NULL) {
char s[]=" \t";
if (strchr(line_str, '#')) {
continue;
}
/* get the first token */
token = strtok(line_str, s);
if (NULL != token) {
if (!strcmp(token, "sensor_index")) {
token = strtok(NULL, s);
if (NULL != token) {
obj->sensor_sel = atoi(token);
printf("sensor_selection = [%d]\n", obj->sensor_sel);
}
} else if (!strcmp(token, "ldc_enable")) {
token = strtok(NULL, s);
if (NULL != token) {
obj->ldc_enable = atoi(token);
printf("ldc_enable = [%d]\n", obj->ldc_enable);
}
} else if (!strcmp(token, "in_size")) {
token = strtok(NULL, s);
if (NULL != token) {
obj->width_in = atoi(token);
printf("width_in = [%d]\n", obj->width_in);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
obj->height_in = atoi(token);
printf("height_in = [%d]\n", obj->height_in);
}
}
} else if (!strcmp(token, "out_size")) {
token = strtok(NULL, s);
if (NULL != token) {
obj->width_out = atoi(token);
printf("width_out = [%d]\n", obj->width_out);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
obj->height_out = atoi(token);
printf("height_out = [%d]\n", obj->height_out);
}
}
} else if (!strcmp(token, "use_csi1")) {
token = strtok(NULL, s);
if (NULL != token) {
obj->use_csi1 = atoi(token);
printf("use_csi1 = [%d]\n", obj->use_csi1);
}
} else if (!strcmp(token, "num_frames_to_run")) {
token = strtok(NULL, s);
if (NULL != token) {
obj->num_frames_to_run = atoi(token);
printf("num_frames_to_run = [%d]\n", obj->num_frames_to_run);
}
} else if (!strcmp(token, "is_interactive")) {
token = strtok(NULL, s);
if (NULL != token) {
obj->is_interactive = atoi(token);
printf("is_interactive = [%d]\n", obj->is_interactive);
}
} else if (!strcmp(token, "host_location")) {
token = strtok(NULL, s);
if (NULL != token) {
char v = token[0];
if (v == HOST_L || v == HOST_R)
{
obj->host_location = v;
printf("host_location = [%c]\n", obj->host_location);
vx_rectangle_t default_rect = left_camera_default_rect;
if (v == HOST_R)
{
default_rect = right_camera_default_rect;
}
if (!camera1Inited)
obj->camera1rect = default_rect;
if (!camera2Inited)
obj->camera2rect = default_rect;
if (!camera3Inited)
obj->camera3rect = default_rect;
if (!camera5Inited)
obj->camera5rect = default_rect;
}
}
} else if (!strcmp(token, "ROI1")) {
token = strtok(NULL, s);
if (NULL != token) {
start_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
start_y = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_y = atoi(token);
camera1Inited = TRUE;
obj->camera1rect.start_x = start_x;
obj->camera1rect.start_y = start_y;
obj->camera1rect.end_x = end_x;
obj->camera1rect.end_y = end_y;
printf("ROI1: %d %d %d %d\n", start_x, start_y, end_x, end_y);
}
}
}
}
} else if (!strcmp(token, "ROI2")) {
token = strtok(NULL, s);
if (NULL != token) {
start_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
start_y = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_y = atoi(token);
camera2Inited = TRUE;
obj->camera2rect.start_x = start_x;
obj->camera2rect.start_y = start_y;
obj->camera2rect.end_x = end_x;
obj->camera2rect.end_y = end_y;
printf("ROI2: %d %d %d %d\n", start_x, start_y, end_x, end_y);
}
}
}
}
} else if (!strcmp(token, "ROI3")) {
token = strtok(NULL, s);
if (NULL != token) {
start_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
start_y = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_y = atoi(token);
camera3Inited = TRUE;
obj->camera3rect.start_x = start_x;
obj->camera3rect.start_y = start_y;
obj->camera3rect.end_x = end_x;
obj->camera3rect.end_y = end_y;
printf("ROI3: %d %d %d %d\n", start_x, start_y, end_x, end_y);
}
}
}
}
} else if (!strcmp(token, "ROI5")) {
token = strtok(NULL, s);
if (NULL != token) {
start_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
token = strtok(NULL, s);
start_y = atoi(token);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_x = atoi(token);
token = strtok(NULL, s);
if (token != NULL) {
if (token[strlen(token)-1] == '\n')
token[strlen(token)-1]=0;
end_y = atoi(token);
camera5Inited = TRUE;
obj->camera5rect.start_x = start_x;
obj->camera5rect.start_y = start_y;
obj->camera5rect.end_x = end_x;
obj->camera5rect.end_y = end_y;
printf("ROI5: %d %d %d %d\n", start_x, start_y, end_x, end_y);
}
}
}
}
} else {
if (strlen(token) > 2)
APP_PRINTF("Invalid token [%s]\n", token);
}
}
}
fclose(fp);
}
if (obj->width_in < 128)
obj->width_in = 128;
if (obj->height_in < 128)
obj->height_in = 128;
if (obj->width_out < 128)
obj->width_out = 128;
if (obj->height_out < 128)
obj->height_out = 128;
}
vx_status app_parse_cmd_line_args(AppObj *obj, int argc, char *argv[]) {
vx_bool set_test_mode = vx_false_e;
vx_int8 sensor_override = 0xFF;
int i;
app_set_cfg_default(obj);
if (argc == 1) {
app_show_usage(argc, argv);
printf("Defaulting to interactive mode \n");
obj->is_interactive = 1;
return VX_SUCCESS;
}
for (i=0; i<argc; i++) {
if (!strcmp(argv[i], "--cfg")) {
i++;
if (i>=argc) {
app_show_usage(argc, argv);
}
app_parse_cfg_file(obj, argv[i]);
} else if (!strcmp(argv[i], "--help")) {
app_show_usage(argc, argv);
return VX_FAILURE;
} else if (!strcmp(argv[i], "--test")) {
set_test_mode = vx_true_e;
} else if (!strcmp(argv[i], "--sensor")) {
// check to see if there is another argument following --sensor
if (argc > i+1) {
sensor_override = atoi(argv[i+1]);
// increment i again to avoid this arg
i++;
}
} else if (!strcmp(argv[i], "--use_csi1")) {
obj->use_csi1 = 1;
printf("use_csi1 = [%d]\n", obj->use_csi1);
} else if (!strcmp(argv[i], "--fake")) {
obj->fakeImg = 1;
printf("fakeImg = [%d]\n", obj->fakeImg);
} else if (!strcmp(argv[i], "--interactive")) {
obj->is_interactive = 1;
printf("is_interactive = [%d]\n", obj->is_interactive);
} else if (!strcmp(argv[i], "--num_frames_to_run")) {
if (argc > i+1) {
obj->num_frames_to_run = atoi(argv[i+1]);
// increment i again to avoid this arg
i++;
}
printf("num_frames_to_run = [%d]\n", obj->num_frames_to_run);
} else if (!strcmp(argv[i], "--showFisheye")) {
obj->showFisheye = 1;
printf("showFisheye = [%d]\n", obj->showFisheye);
}
}
if (set_test_mode == vx_true_e) {
obj->test_mode = 1;
obj->is_interactive = 0;
obj->num_frames_to_run = NUM_FRAMES;
if (sensor_override != 0xFF) {
obj->sensor_sel = sensor_override;
}
}
if (obj->use_csi1 == 0)
printf("use csi0\n");
else
printf("use csi1\n");
return VX_SUCCESS;
}
AppObj gAppObj;
int app_single_cam_main(int argc, char* argv[]) {
AppObj *obj = &gAppObj;
vx_status status = VX_FAILURE;
status = app_parse_cmd_line_args(obj, argc, argv);
if (VX_SUCCESS == status) {
status = app_init(obj);
if (VX_SUCCESS == status) {
APP_PRINTF("app_init done\n");
/* Not checking status because application may be waiting for
error/test frame */
app_create_graph(obj);
if (VX_SUCCESS == status) {
APP_PRINTF("app_create_graph done\n");
if (obj->is_interactive) {
status = app_run_graph_interactive(obj);
} else {
status = app_run_graph(obj);
}
if (VX_SUCCESS == status) {
APP_PRINTF("app_run_graph done\n");
status = app_delete_graph(obj);
if (VX_SUCCESS == status) {
APP_PRINTF("app_delete_graph done\n");
} else {
printf("Error : app_delete_graph returned 0x%x \n", status);
}
} else {
printf("Error : app_run_graph_xx returned 0x%x \n", status);
}
} else {
printf("Error : app_create_graph returned 0x%x is_interactive =%d \n", status, obj->is_interactive);
}
} else {
printf("Error : app_init returned 0x%x \n", status);
}
status = app_deinit(obj);
if (VX_SUCCESS == status) {
APP_PRINTF("app_deinit done\n");
} else {
printf("Error : app_deinit returned 0x%x \n", status);
}
appDeInitImageSensor(obj->sensor_name);
} else {
printf("Error: app_parse_cmd_line_args returned 0x%x \n", status);
}
if (obj->test_mode == 1) {
if ((test_result == vx_false_e) || (status == VX_FAILURE)) {
printf("\n\nTEST FAILED\n\n");
print_new_checksum_structs();
status = (status == VX_SUCCESS) ? VX_FAILURE : status;
} else {
printf("\n\nTEST PASSED\n\n");
}
}
return status;
}
vx_status app_send_test_frame(vx_node cap_node, tivx_raw_image raw_img)
{
vx_status status = VX_SUCCESS;
status = tivxCaptureRegisterErrorFrame(cap_node, (vx_reference)raw_img);
return status;
}
How to solve it?
BR,
Jeff
