Tool/software:
Hello ,
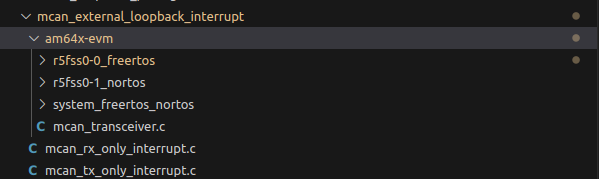
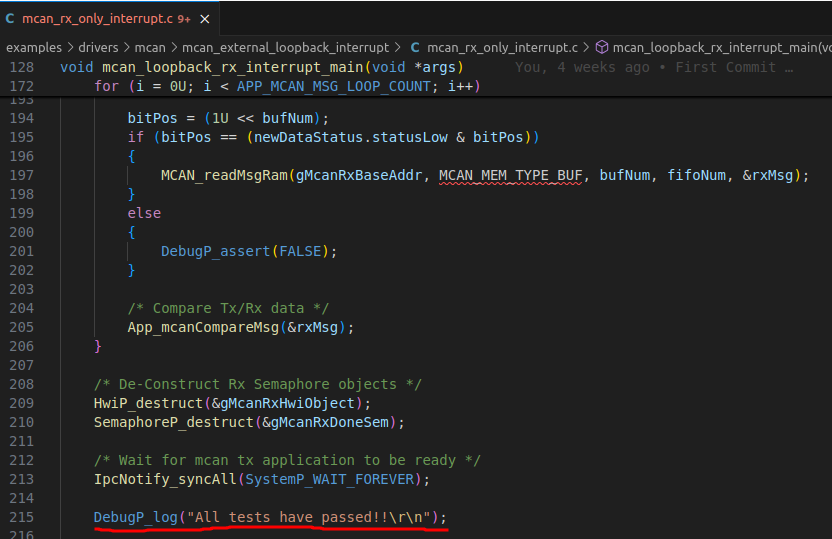
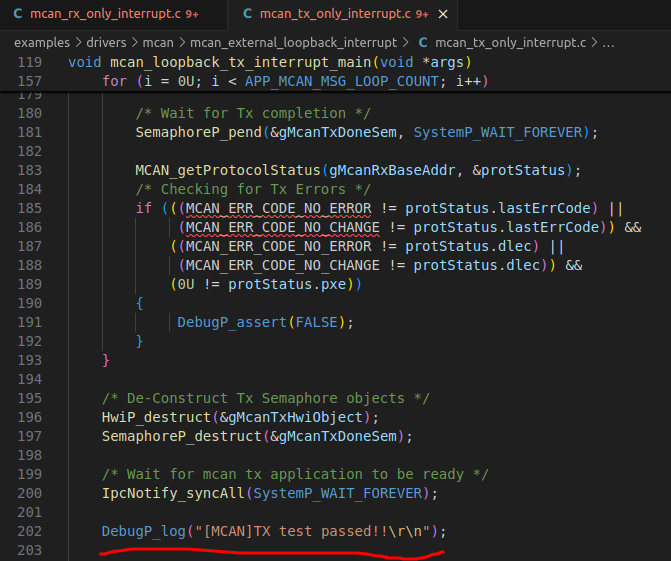
I'm using mcu_plus_sdk_am64x_10_01_00_32 to try the mcan_external_loopback_interrupt_am64x-evm_r5fss0-0_freertos example, but when I debug the code, the compiler blocks as shown in the screenshot below. I don't shown any debug log .