Tool/software:
256KB SRAM memory system divided into two banks
– 192KB of instruction code (I-RAM)
– 64KB of data space (D-RAM)
Hello TI expert,
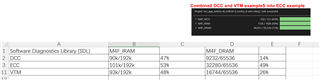
We are doing the development of SDL on M4F, there are some examples provided by TI.
When I integrate three of them, I find that the D-RAM is really not enough for developing with our application software.
I have the concern, does TI have data information about the RAM space needed for all SDL examples?
Or If the D-RAM is not enough for development for SDL, which memory could M4F use?