Tool/software:
Issue Description: The same model, inferring the same image. The result obtained using the TIDL simulation tool is normal. However, when running the inference on the evaluation board, the result is abnormal. Comparing the binary results of both, it is found that most parts are the same, with the matching parts corresponding to the segmented results, which validate correctly. The parts where the binary results differ between the two correspond to the erroneous results.
Original Model:
segod_res18_410.zip
Converted Model:
tidl_io_seg_1.zip
tidl_net_seg.zip
Simulation Inference Result:
seg_out.zip
Evaluation Board Inference Result:
em_seg_output_nopad.zip
Binary Comparison Result: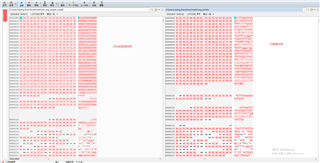
Sample Image:
Floating-point numbers of each layer output:
seg_double_result.zip