Tool/software:
Hy,
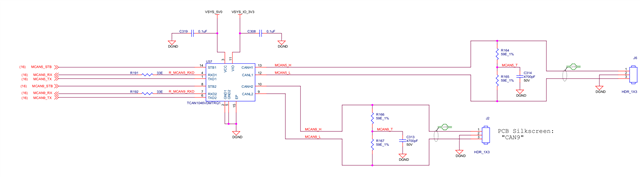
I am using the SDK: rtos-09_02_00_05 on a custom board that has the same schematic like the SK-TDA4VM (MCU_MCAN0, MCAN0, MCAN5 and MCAN9). As example I am following the pdk_jacinto_09_02_00_30/packages/ti/csl/example/mcan/mcanEvmLoopback/mcan_evm_loopback_app_main_k3.c source code.
I want to route the MCAN5 and MCAN9 IR to the MCU1_0 R5F processor. For configuring main MCAN IRQ I am using the following code:
static int32_t MCAN_CfgIrqRouterMain2Mcu(uint32_t devId, uint32_t offset, uint32_t intNum)
{
int32_t retVal;
struct tisci_msg_rm_irq_set_req rmIrqReq;
struct tisci_msg_rm_irq_set_resp rmIrqResp;
rmIrqReq.valid_params = TISCI_MSG_VALUE_RM_DST_ID_VALID;
rmIrqReq.valid_params |= TISCI_MSG_VALUE_RM_DST_HOST_IRQ_VALID;
rmIrqReq.src_id = devId;
rmIrqReq.global_event = 0U;
rmIrqReq.src_index = 1U; /* mcanss_mcan_lvl_int Line 0 */
rmIrqReq.dst_id = TISCI_DEV_MCU_R5FSS0_CORE0;
rmIrqReq.dst_host_irq = intNum;
rmIrqReq.ia_id = 0U;
rmIrqReq.vint = 0U;
rmIrqReq.vint_status_bit_index = 0U;
rmIrqReq.secondary_host = TISCI_MSG_VALUE_RM_UNUSED_SECONDARY_HOST;
retVal = Sciclient_rmIrqSet(&rmIrqReq, &rmIrqResp, SCICLIENT_SERVICE_WAIT_FOREVER);
if(CSL_PASS != retVal)
{
uart_write(DEBUG_UART, "Error in SciClient Interrupt Params Configuration!!!");
snprintf(buffer, sizeof(buffer), "offset: %d \n", offset);
uart_write(DEBUG_UART, buffer);
}
else
{
snprintf(buffer, sizeof(buffer),
"SciClient Interrupt Params Configuration passed for intNum: %08X \n", intNum);
uart_write(DEBUG_UART, buffer);
}
return retVal;
}
And for registering the interrupt:
static int32_t MCAN_regiterISR(uint32_t intNum, void f(uintptr_t))
{
int32_t configStatus = STW_SOK;
OsalRegisterIntrParams_t intrPrms;
OsalInterruptRetCode_e osalRetVal;
HwiP_Handle hwiHandle = NULL;
/* Enable CPU Interrupts and register ISR */
Osal_RegisterInterrupt_initParams(&intrPrms);
/* Populate the interrupt parameters */
intrPrms.corepacConfig.arg = (uintptr_t) NULL;
intrPrms.corepacConfig.isrRoutine = f;
intrPrms.corepacConfig.priority = 1U;
intrPrms.corepacConfig.corepacEventNum = 0U;
intrPrms.corepacConfig.intVecNum = intNum;
/* Register interrupts */
osalRetVal = Osal_RegisterInterrupt(&intrPrms, &hwiHandle);
if(OSAL_INT_SUCCESS != osalRetVal)
{
configStatus = CSL_EFAIL;
uart_write(DEBUG_UART, "Error in registering ISR!!!");
}
return configStatus;
}
My aim is to test the external loopback mode between MCAN5 and MCAN9. As rmIrqReq.src_id I am configuring TISCI_DEV_MCAN5 and TISCI_DEV_MCAN9, and src_index =1 but I don't know for rmIrqReq.dst_host_irq what should I configure? The dst_id is TISCI_DEV_MCU_R5FSS0_CORE0 for both.
Regards,
Tamas