Tool/software:
Hi TI expert,
1. i am using J722s evm and sdk v11 sdcard, spl boot mode.
2. test project is : mcu_plus_sdk_j722s_11_00_00_12/test/drivers/gpio/ running on mcu10.
3. by default, it failed on "GPIO_TRIG_TYPE_BOTH_EDGE" case, since GPIO_getBankIntrStatus not get correct status, it return 0 as most cast. but change delay x10 smaller, it will pass.
4. in rising trigger case, it's passed by default, but when add more delay, eg. change times 1000 to 3000, it will also failed.
my question is:
1. why a long delay after setting a gpio level will not get the right status, mostly get zero.
2. a quick read bank status seems not get the real status, how to solve this?
/*
* Copyright (C) 2021 Texas Instruments Incorporated
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the
* distribution.
*
* Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/* ========================================================================== */
/* Include Files */
/* ========================================================================== */
#include <stdio.h>
#include <string.h>
#include <inttypes.h>
#include <unity.h>
#include <drivers/gpio.h>
#include <kernel/dpl/DebugP.h>
#include <kernel/dpl/ClockP.h>
#include <kernel/dpl/AddrTranslateP.h>
#include "ti_drivers_config.h"
#include "ti_drivers_open_close.h"
/* ========================================================================== */
/* Macros & Typedefs */
/* ========================================================================== */
/* None */
/* ========================================================================== */
/* Structures and Enums */
/* ========================================================================== */
/** \brief GPIO test params */
typedef struct Test_GpioPrms
{
uint32_t baseAddr;
uint32_t pinNum;
uint32_t trigType;
uint32_t loopcnt;
uint32_t delayms;
volatile uint32_t intrcnt;
} Test_GpioPrms_t;
/* ========================================================================== */
/* Internal Function Declarations */
/* ========================================================================== */
/* Testcases */
static void test_gpio_output(void *args);
static void test_gpio_read(void *args);
static void test_gpio_trigger(void *args);
static void test_gpio_macros(void *args);
/* Helper functions */
static void test_gpio_toggle_loop(Test_GpioPrms_t *testPrms);
static void test_gpio_read_loop(Test_GpioPrms_t *testPrms);
static void test_gpio_trigger_loop(Test_GpioPrms_t *testPrms);
/* ========================================================================== */
/* Global Variables */
/* ========================================================================== */
/* None */
/* ========================================================================== */
/* Function Definitions */
/* ========================================================================== */
void test_main(void *args)
{
/* Open drivers to open the UART driver for console */
Drivers_open();
UNITY_BEGIN();
RUN_TEST(test_gpio_output, 166, NULL);
RUN_TEST(test_gpio_read, 167, NULL);
RUN_TEST(test_gpio_trigger, 168, NULL);
RUN_TEST(test_gpio_macros, 169, NULL);
UNITY_END();
Drivers_close();
return;
}
/*
* Unity framework required functions
*/
void setUp(void)
{
}
void tearDown(void)
{
}
/*
* Testcases
*/
static void test_gpio_output(void *args)
{
Test_GpioPrms_t testPrms;
DebugP_log("\ntest_gpio_output started...\r\n");
testPrms.baseAddr = GPIO_LED_BASE_ADDR;
testPrms.baseAddr = (uint32_t) AddrTranslateP_getLocalAddr(testPrms.baseAddr);
testPrms.pinNum = GPIO_LED_PIN;
testPrms.loopcnt = 5;
testPrms.delayms = 100;
test_gpio_toggle_loop(&testPrms);
DebugP_log("test_gpio_output end!!!\r\n");
return;
}
static void test_gpio_read(void *args)
{
Test_GpioPrms_t testPrms;
DebugP_log("\ntest_gpio_read started...\r\n");
testPrms.baseAddr = GPIO_PUSH_BUTTON_BASE_ADDR;
testPrms.baseAddr = (uint32_t) AddrTranslateP_getLocalAddr(testPrms.baseAddr);
testPrms.pinNum = GPIO_PUSH_BUTTON_PIN;
testPrms.loopcnt = 5;
testPrms.delayms = 100;
test_gpio_read_loop(&testPrms);
DebugP_log("test_gpio_read end!!!\r\n");
return;
}
static void test_gpio_trigger(void *args)
{
Test_GpioPrms_t testPrms;
DebugP_log("\ntest_gpio_trigger started 111...%x, %d\r\n", GPIO_LED_BASE_ADDR, GPIO_LED_PIN);
testPrms.baseAddr = GPIO_LED_BASE_ADDR;
testPrms.baseAddr = (uint32_t) AddrTranslateP_getLocalAddr(testPrms.baseAddr);
testPrms.pinNum = GPIO_LED_PIN;
testPrms.loopcnt = 5;
testPrms.delayms = 100;
testPrms.trigType = GPIO_TRIG_TYPE_RISE_EDGE;
test_gpio_trigger_loop(&testPrms);
testPrms.trigType = GPIO_TRIG_TYPE_FALL_EDGE;
test_gpio_trigger_loop(&testPrms);
testPrms.trigType = GPIO_TRIG_TYPE_BOTH_EDGE;
test_gpio_trigger_loop(&testPrms);
DebugP_log("test_gpio_trigger end!!!\r\n");
return;
}
static void test_gpio_macros(void *args)
{
uint32_t index, pos, mask;
DebugP_log("\ntest_gpio_macros started...\r\n");
/* Macro checks */
TEST_ASSERT_EQUAL_UINT32(16, GPIO_MAX_PIN_PER_BANK);
TEST_ASSERT_EQUAL_UINT32(2, GPIO_BANKS_PER_REG);
TEST_ASSERT_EQUAL_UINT32(32, GPIO_PINS_PER_REG);
/* Bank index test */
index = GPIO_GET_BANK_INDEX(0);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_BANK_INDEX(8);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_BANK_INDEX(15);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_BANK_INDEX(16);
TEST_ASSERT_EQUAL_UINT32(1, index);
index = GPIO_GET_BANK_INDEX(24);
TEST_ASSERT_EQUAL_UINT32(1, index);
index = GPIO_GET_BANK_INDEX(31);
TEST_ASSERT_EQUAL_UINT32(1, index);
index = GPIO_GET_BANK_INDEX(32);
TEST_ASSERT_EQUAL_UINT32(2, index);
index = GPIO_GET_BANK_INDEX(100);
TEST_ASSERT_EQUAL_UINT32(6, index);
/* Register index test */
index = GPIO_GET_REG_INDEX(0);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_REG_INDEX(8);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_REG_INDEX(15);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_REG_INDEX(16);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_REG_INDEX(24);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_REG_INDEX(31);
TEST_ASSERT_EQUAL_UINT32(0, index);
index = GPIO_GET_REG_INDEX(32);
TEST_ASSERT_EQUAL_UINT32(1, index);
index = GPIO_GET_REG_INDEX(63);
TEST_ASSERT_EQUAL_UINT32(1, index);
index = GPIO_GET_REG_INDEX(64);
TEST_ASSERT_EQUAL_UINT32(2, index);
index = GPIO_GET_REG_INDEX(100);
TEST_ASSERT_EQUAL_UINT32(3, index);
/* Register bit position test */
pos = GPIO_GET_BIT_POS(0);
TEST_ASSERT_EQUAL_UINT32(0, pos);
pos = GPIO_GET_BIT_POS(8);
TEST_ASSERT_EQUAL_UINT32(8, pos);
pos = GPIO_GET_BIT_POS(15);
TEST_ASSERT_EQUAL_UINT32(15, pos);
pos = GPIO_GET_BIT_POS(16);
TEST_ASSERT_EQUAL_UINT32(16, pos);
pos = GPIO_GET_BIT_POS(24);
TEST_ASSERT_EQUAL_UINT32(24, pos);
pos = GPIO_GET_BIT_POS(31);
TEST_ASSERT_EQUAL_UINT32(31, pos);
pos = GPIO_GET_BIT_POS(32);
TEST_ASSERT_EQUAL_UINT32(0, pos);
pos = GPIO_GET_BIT_POS(63);
TEST_ASSERT_EQUAL_UINT32(31, pos);
pos = GPIO_GET_BIT_POS(64);
TEST_ASSERT_EQUAL_UINT32(0, pos);
pos = GPIO_GET_BIT_POS(100);
TEST_ASSERT_EQUAL_UINT32(4, pos);
/* Bank bit position test */
pos = GPIO_GET_BANK_BIT_POS(0);
TEST_ASSERT_EQUAL_UINT32(0, pos);
pos = GPIO_GET_BANK_BIT_POS(8);
TEST_ASSERT_EQUAL_UINT32(8, pos);
pos = GPIO_GET_BANK_BIT_POS(15);
TEST_ASSERT_EQUAL_UINT32(15, pos);
pos = GPIO_GET_BANK_BIT_POS(16);
TEST_ASSERT_EQUAL_UINT32(0, pos);
pos = GPIO_GET_BANK_BIT_POS(24);
TEST_ASSERT_EQUAL_UINT32(8, pos);
pos = GPIO_GET_BANK_BIT_POS(31);
TEST_ASSERT_EQUAL_UINT32(15, pos);
pos = GPIO_GET_BANK_BIT_POS(32);
TEST_ASSERT_EQUAL_UINT32(0, pos);
pos = GPIO_GET_BANK_BIT_POS(63);
TEST_ASSERT_EQUAL_UINT32(15, pos);
pos = GPIO_GET_BANK_BIT_POS(64);
TEST_ASSERT_EQUAL_UINT32(0, pos);
pos = GPIO_GET_BANK_BIT_POS(100);
TEST_ASSERT_EQUAL_UINT32(4, pos);
/* Register bit mask test */
mask = GPIO_GET_BIT_MASK(0);
TEST_ASSERT_EQUAL_UINT32(0x00000001, mask);
mask = GPIO_GET_BIT_MASK(8);
TEST_ASSERT_EQUAL_UINT32(0x00000100, mask);
mask = GPIO_GET_BIT_MASK(15);
TEST_ASSERT_EQUAL_UINT32(0x00008000, mask);
mask = GPIO_GET_BIT_MASK(16);
TEST_ASSERT_EQUAL_UINT32(0x00010000, mask);
mask = GPIO_GET_BIT_MASK(24);
TEST_ASSERT_EQUAL_UINT32(0x01000000, mask);
mask = GPIO_GET_BIT_MASK(31);
TEST_ASSERT_EQUAL_UINT32(0x80000000, mask);
mask = GPIO_GET_BIT_MASK(32);
TEST_ASSERT_EQUAL_UINT32(0x00000001, mask);
mask = GPIO_GET_BIT_MASK(63);
TEST_ASSERT_EQUAL_UINT32(0x080000000, mask);
mask = GPIO_GET_BIT_MASK(64);
TEST_ASSERT_EQUAL_UINT32(0x00000001, mask);
mask = GPIO_GET_BIT_MASK(100);
TEST_ASSERT_EQUAL_UINT32(0x00000010, mask);
/* Bank bit mask test */
mask = GPIO_GET_BANK_BIT_MASK(0);
TEST_ASSERT_EQUAL_UINT32(0x0001, mask);
mask = GPIO_GET_BANK_BIT_MASK(8);
TEST_ASSERT_EQUAL_UINT32(0x0100, mask);
mask = GPIO_GET_BANK_BIT_MASK(15);
TEST_ASSERT_EQUAL_UINT32(0x8000, mask);
mask = GPIO_GET_BANK_BIT_MASK(16);
TEST_ASSERT_EQUAL_UINT32(0x0001, mask);
mask = GPIO_GET_BANK_BIT_MASK(24);
TEST_ASSERT_EQUAL_UINT32(0x0100, mask);
mask = GPIO_GET_BANK_BIT_MASK(31);
TEST_ASSERT_EQUAL_UINT32(0x8000, mask);
mask = GPIO_GET_BANK_BIT_MASK(32);
TEST_ASSERT_EQUAL_UINT32(0x0001, mask);
mask = GPIO_GET_BANK_BIT_MASK(63);
TEST_ASSERT_EQUAL_UINT32(0x8000, mask);
mask = GPIO_GET_BANK_BIT_MASK(64);
TEST_ASSERT_EQUAL_UINT32(0x0001, mask);
mask = GPIO_GET_BANK_BIT_MASK(100);
TEST_ASSERT_EQUAL_UINT32(0x0010, mask);
DebugP_log("test_gpio_macros end!!!\r\n");
return;
}
/*
* Other functions
*/
static void test_gpio_toggle_loop(Test_GpioPrms_t *testPrms)
{
uint32_t pinValue, loopcnt;
GPIO_setDirMode(testPrms->baseAddr, testPrms->pinNum, GPIO_DIRECTION_OUTPUT);
loopcnt = 0;
while(loopcnt < testPrms->loopcnt)
{
GPIO_pinWriteHigh(testPrms->baseAddr, testPrms->pinNum);
/* Readback and check */
pinValue = GPIO_pinOutValueRead(testPrms->baseAddr, testPrms->pinNum);
TEST_ASSERT_EQUAL_UINT32(GPIO_PIN_HIGH, pinValue);
ClockP_usleep(testPrms->delayms * 1000);
GPIO_pinWriteLow(testPrms->baseAddr, testPrms->pinNum);
/* Readback and check */
pinValue = GPIO_pinOutValueRead(testPrms->baseAddr, testPrms->pinNum);
TEST_ASSERT_EQUAL_UINT32(GPIO_PIN_LOW, pinValue);
ClockP_usleep(testPrms->delayms * 1000);
loopcnt++;
}
return;
}
static void test_gpio_read_loop(Test_GpioPrms_t *testPrms)
{
uint32_t pinValue, loopcnt;
GPIO_setDirMode(testPrms->baseAddr, testPrms->pinNum, GPIO_DIRECTION_INPUT);
loopcnt = 0;
while(loopcnt < testPrms->loopcnt)
{
pinValue = GPIO_pinRead(testPrms->baseAddr, testPrms->pinNum);
DebugP_log("Current GPIO pin value: %d\r\n", pinValue);
ClockP_usleep(testPrms->delayms * 1000);
loopcnt++;
}
return;
}
static void test_gpio_trigger_loop(Test_GpioPrms_t *testPrms)
{
uint32_t bankNum, loopcnt;
uint32_t intrStatus, pinMask;
testPrms->intrcnt = 0;
bankNum = GPIO_GET_BANK_INDEX(testPrms->pinNum);
pinMask = GPIO_GET_BANK_BIT_MASK(testPrms->pinNum);
GPIO_setDirMode(testPrms->baseAddr, testPrms->pinNum, GPIO_DIRECTION_OUTPUT);
/* Set init value based on trigger required */
if((GPIO_TRIG_TYPE_RISE_EDGE == testPrms->trigType) ||
(GPIO_TRIG_TYPE_BOTH_EDGE == testPrms->trigType))
{
GPIO_pinWriteLow(testPrms->baseAddr, testPrms->pinNum);
}
else
{
GPIO_pinWriteHigh(testPrms->baseAddr, testPrms->pinNum);
}
ClockP_usleep(testPrms->delayms * 1000);
/* Configure trigger */
GPIO_setTrigType(testPrms->baseAddr, testPrms->pinNum, testPrms->trigType);
GPIO_bankIntrEnable(testPrms->baseAddr, bankNum);
loopcnt = 0;
while(loopcnt < testPrms->loopcnt)
{
if(GPIO_TRIG_TYPE_BOTH_EDGE == testPrms->trigType)
{
/* Since both edge, trigger alternatively */
if((loopcnt & 0x01) == 0)
{
GPIO_pinWriteHigh(testPrms->baseAddr, testPrms->pinNum);
ClockP_usleep(testPrms->delayms * 3000);
}
else
{
GPIO_pinWriteLow(testPrms->baseAddr, testPrms->pinNum);
ClockP_usleep(testPrms->delayms * 3000);
}
/* Check for interrupt status */
intrStatus = GPIO_getBankIntrStatus(testPrms->baseAddr, bankNum);
DebugP_log("bank status both %x,%x, %d\r\n", testPrms->baseAddr, bankNum, intrStatus);
GPIO_clearBankIntrStatus(testPrms->baseAddr, bankNum, intrStatus);
if(intrStatus & pinMask)
{
testPrms->intrcnt++;
}
}
if(GPIO_TRIG_TYPE_RISE_EDGE == testPrms->trigType)
{
GPIO_pinWriteHigh(testPrms->baseAddr, testPrms->pinNum);
ClockP_usleep(testPrms->delayms * 3000);
/* Check for interrupt status */
intrStatus = GPIO_getBankIntrStatus(testPrms->baseAddr, bankNum);
DebugP_log("bank status rise %x,%x, %d\r\n", testPrms->baseAddr, bankNum, intrStatus);
GPIO_clearBankIntrStatus(testPrms->baseAddr, bankNum, intrStatus);
if(intrStatus & pinMask)
{
testPrms->intrcnt++;
}
GPIO_pinWriteLow(testPrms->baseAddr, testPrms->pinNum);
ClockP_usleep(testPrms->delayms * 3000);
/* Check for interrupt status - it should not occur */
intrStatus = GPIO_getBankIntrStatus(testPrms->baseAddr, bankNum);
TEST_ASSERT_EQUAL_UINT32(0, (intrStatus & pinMask));
}
if(GPIO_TRIG_TYPE_FALL_EDGE == testPrms->trigType)
{
GPIO_pinWriteLow(testPrms->baseAddr, testPrms->pinNum);
ClockP_usleep(testPrms->delayms * 3000);
/* Check for interrupt status */
intrStatus = GPIO_getBankIntrStatus(testPrms->baseAddr, bankNum);
DebugP_log("bank status fall %x,%x, %d\r\n", testPrms->baseAddr, bankNum, intrStatus);
GPIO_clearBankIntrStatus(testPrms->baseAddr, bankNum, intrStatus);
if(intrStatus & pinMask)
{
testPrms->intrcnt++;
}
GPIO_pinWriteHigh(testPrms->baseAddr, testPrms->pinNum);
ClockP_usleep(testPrms->delayms * 3000);
/* Check for interrupt status - it should not occur */
intrStatus = GPIO_getBankIntrStatus(testPrms->baseAddr, bankNum);
TEST_ASSERT_EQUAL_UINT32(0, (intrStatus & pinMask));
}
loopcnt++;
}
TEST_ASSERT_EQUAL_INT32(testPrms->loopcnt, testPrms->intrcnt);
/* Unregister interrupt */
GPIO_bankIntrDisable(testPrms->baseAddr, bankNum);
GPIO_setTrigType(testPrms->baseAddr, testPrms->pinNum, GPIO_TRIG_TYPE_NONE);
GPIO_clearIntrStatus(testPrms->baseAddr, testPrms->pinNum);
/* Reset to default value */
GPIO_pinWriteLow(testPrms->baseAddr, testPrms->pinNum);
return;
}
my test code:
j722s-rtos-sdk-c2/mcu_plus_sdk_j722s_11_00_00_12/test/drivers/gpio/test_gpio.c
thanks.

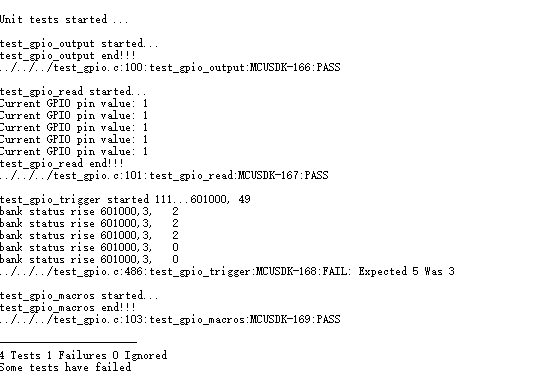 , uart log (rising edge mode, with 5000 delay , test fail)
, uart log (rising edge mode, with 5000 delay , test fail)