Tool/software:
1.rtos sdk version is j722s-rtos-sdk-v11
2.When debugging the CAN transceiver of TDA4VEN, I encountered an issue: when transmitting and receiving messages simultaneously on the same CAN bus, frame loss occurs during message transmission. The transmission is using the buffer method and receive is using the fifo0.Additionally, the return value of MCAN_txBufAddReq() is normal.
2.1 The CAN baud rate is 500k and the sampling point is 80%
3.vt_can.c and vt_can.h codes are as follows
3.1. The entry function of vt_can.c is int32_t vtcan_init (void), the can send function is int32_t vtcan_txmsg (stCANTypeMsgBaseInfo TxMsgInfo, uint8_t TxMsgBufNum), and the can interrupt is void vtcan_mcan0IntrISR (void *arg)
#include "can/vt_can.h"
#include <stdbool.h>
#include <stdint.h>
#include <string.h>
#define APP_MCAN_TX_BUFF_SIZE MCAN0_TOTAL_TX_MSG
#define APP_MCAN_TX_EVENT_FIFO_CNT (0x0U)
#define APP_MCAN_TX_FIFO_SIZE (0U)
#define APP_MCAN_FIFO_0_NUM (64U)
#define APP_MCAN_FIFO_1_NUM (64U)
#define APP_MCAN_STD_ID_FILTER_NUM (128U)
#define APP_MCAN_EXT_ID_FILTER_NUM (0U)
static uint32_t gMcan0BaseAddr;
static HwiP_Object gMcan0HwiObject;
static uint32_t Mcan0IsrIntrStatus;
//SemaphoreP_Object gMcan0TxDoneSem, gMcan0RxDoneSem;
MCAN_StdMsgIDFilterElement MCAN0_canSTDIDFilter[MCAN0_TOTAL_RX_MSG];
MCAN_StdMsgIDFilterElement MCAN1_canSTDIDFilter[MCAN1_TOTAL_RX_MSG];
typedef struct{
uint8_t CAN0BusErr;
uint8_t CAN1BusErr;
}stBusOffFlagInfo;
stBusOffFlagInfo MCANBusOffInfo;
MCAN_BitTimingParams MCAN0_canFDBitTimings[] =
{
/* 500kbps 80% and 2000 kbps 80% */
/* This is default baud*/
{
0x0FU, /* Nominal Baud Rate Pre-scaler */
0x06U, /* Nominal Time segment before sample point */
0x01U, /* Nominal Time segment after sample point */
0x00U, /* Nominal (Re)Synchronization Jump Width */
0x07U, /* Data Baud Rate Pre-scaler */
0x02U, /* Data Time segment before sample point */
0x00U, /* Data Time segment after sample point */
0x00U /* Data (Re)Synchronization Jump Width */
},
};
MCAN_InitParams MCAN0_canFDInitParams[] =
{
{
#ifdef CAN0_MODULE_CANFD
0x01U, /* FD Operation Enable */
0x01U, /* Bit Rate Switch Enable */
#else
0x00U, /* FD Operation Enable */
0x00U, /* Bit Rate Switch Enable */
#endif
0x00U, /* Transmit Pause */
0x00U, /* FEdge Filtering during Bus Integration */
0x00U, /* Protocol Exception Handling Disable */
0x01U, /* Disable Automatic Retransmission */
0x01U, /* Wakeup Request Enable */
0x01U, /* Auto-Wakeup Enable */
0x00U, /* Emulation/Debug Suspend Enable */
0x00U, /* Emulation/Debug Suspend Fast Ack Enable */
0x00U, /* Clock Stop Fast Ack Enable */
0x00U, /* Start value of the Message RAM Watchdog Counter */
{
0x0AU, /* Transmitter Delay Compensation Offset */
0x06U, /* Transmitter Delay Compensation Filter Window Length */
},
0x00U, /* Transmitter Delay Compensation Enable */
},
};
MCAN_ConfigParams MCAN0_canFDConfigParams[] =
{
/* Config 0 */
{
0x0U, /* Bus Monitoring Mode */
0x0U, /* Restricted Operation Mode */
0xFU, /* Timestamp Counter Prescaler */
0x0U, /* Timestamp source selection */
MCAN_TIMEOUT_SELECT_CONT, /* Time-out counter source select */
0xFFFFU, /* Start value of the Timeout Counter (down-counter) */
0x0U, /* Time-out Counter Enable */
{
0x1U, /* Reject Remote Frames Extended */
0x1U, /* Reject Remote Frames Standard */
0x2U, /* Accept Non-matching Frames Extended */
0x2U, /* Accept Non-matching Frames Standard */
},
},
};
MCAN_MsgRAMConfigParams MCAN0_canFDRAMConfigParams[] =
{
{
.lss = APP_MCAN_STD_ID_FILTER_NUM, /* List Size: Standard ID */
.lse = APP_MCAN_EXT_ID_FILTER_NUM, /* List Size: Extended ID*/
.txBufCnt = APP_MCAN_TX_BUFF_SIZE, /* Number of Dedicated Transmit Buffers */
.txFIFOCnt = APP_MCAN_TX_FIFO_SIZE, /* Transmit FIFO/Queue Size */
.txBufMode = MCAN_TX_MEM_TYPE_BUF, /* Tx FIFO/Queue Mode */
.txEventFIFOCnt = APP_MCAN_TX_EVENT_FIFO_CNT, /* Tx Buffer Element Size */
.rxFIFO0Cnt = APP_MCAN_FIFO_0_NUM, /* Event FIFO Size */
.rxFIFO0OpMode = MCAN_RX_FIFO_OPERATION_MODE_BLOCKING, /* Rx FIFO0 Operation Mode */
.rxFIFO1Cnt = APP_MCAN_FIFO_1_NUM, /* Rx FIFO1 Size */
.rxFIFO1OpMode = MCAN_RX_FIFO_OPERATION_MODE_BLOCKING, /* Rx FIFO1 Operation Mode */
.rxBufElemSize = MCAN_ELEM_SIZE_64BYTES, /* Rx Buffer Element Size */
.rxFIFO0ElemSize = MCAN_ELEM_SIZE_64BYTES, /* Rx FIFO0 Element Size */
.rxFIFO1ElemSize = MCAN_ELEM_SIZE_64BYTES, /* Rx FIFO1 Element Size */
.txEventFIFOWaterMark = 0U, /* Tx Event FIFO Watermark */
.rxFIFO0WaterMark = 0U, /* RX FIFO0 Watermark */
.rxFIFO1WaterMark = 0U, /* RX FIFO1 FIFO Watermark */
},
};
st_mcanParams sMCAN0Params[] =
{
/* mcanConfigParams,
* printEnable,
*/
{
{
(&MCAN0_canFDBitTimings[0U]), /* mcan module bit timing parameters */
(&MCAN0_canFDInitParams[0U]), /* mcan module initialization parameters */
(&MCAN0_canFDConfigParams[0U]), /* mcan module configuration parameters */
(&MCAN0_canFDRAMConfigParams[0U]), /* mcan module MSG RAM configuration parameters */
MCAN0_TOTAL_TX_MSG, /* tx message number */
MCAN0_TOTAL_RX_MSG, /* standard ID message filter number */
(MCAN_INTR_MASK_ALL), /* Interrupt Enable/Disable Mask */
(MCAN_INTR_MASK_ALL), /* Interrupt Line Select Mask */
(MCAN_INTR_LINE_NUM_0) /* Interrupt Line Select */
},
TRUE,
},
};
/**
return ID: 0, no more message
*/
stCANTypeMsgBaseInfo vtcan_mcan0ReadRxMSG(void)
{
uint32_t ackIdx = 0;
stCANTypeMsgBaseInfo RxMsgInfo = { 0 };
MCAN_RxFIFOStatus fifoStatus = { 0 };
MCAN_RxBufElement rxMsg;
memset(&rxMsg, 0x0, sizeof(rxMsg));
MCAN_getRxFIFOStatus(gMcan0BaseAddr, &fifoStatus);
// DebugP_log("fifoStatus %d, %d, %d, %d, %d\n", fifoStatus.num, fifoStatus.getIdx, fifoStatus.fillLvl,fifoStatus.putIdx);
ackIdx = fifoStatus.getIdx;
if (fifoStatus.fillLvl) {
MCAN_readMsgRam(gMcan0BaseAddr, MCAN_MEM_TYPE_FIFO, fifoStatus.getIdx, (uint32_t)fifoStatus.num, &rxMsg);
MCAN_writeRxFIFOAck(gMcan0BaseAddr, (uint32_t)fifoStatus.num, ackIdx);
RxMsgInfo.ID = rxMsg.id >> MCAN_STD_ID_SHIFT;
RxMsgInfo.DLC = rxMsg.dlc;
memcpy(&RxMsgInfo.u8Data, &rxMsg.data, RxMsgInfo.DLC);
}
return RxMsgInfo;
}
void vtcan_mcan0IntrISR(void *arg)
{
uint32_t intrStatus;
//stCANTypeMsgBaseInfo RxMsgInfo;
uint32_t rxIntrMask = MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG |
MCAN_INTR_SRC_RX_FIFO0_NEW_MSG |
MCAN_INTR_SRC_RX_FIFO1_NEW_MSG |
MCAN_INTR_SRC_HIGH_PRIO_MSG;
intrStatus = MCAN_getIntrStatus(gMcan0BaseAddr);
MCAN_clearIntrStatus(gMcan0BaseAddr, intrStatus);
Mcan0IsrIntrStatus = (intrStatus & (~MCAN_getIntrLineSelectStatus(gMcan0BaseAddr)));
if ((Mcan0IsrIntrStatus & MCAN_INTR_SRC_TRANS_COMPLETE) == MCAN_INTR_SRC_TRANS_COMPLETE)
{
SemaphoreP_post(&gMcan0TxDoneSem);
}
if ((Mcan0IsrIntrStatus & rxIntrMask) != 0U)
{
if((Mcan0IsrIntrStatus & MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG) == MCAN_INTR_SRC_DEDICATED_RX_BUFF_MSG)
{
}
else if(((Mcan0IsrIntrStatus & MCAN_INTR_SRC_RX_FIFO0_NEW_MSG)) ||
((Mcan0IsrIntrStatus & MCAN_INTR_SRC_RX_FIFO1_NEW_MSG)))
{
//RxMsgInfo = vtcan_mcan0ReadRxMSG();
SemaphoreP_post(&gMcan0RxDoneSem);
}
}
if((Mcan0IsrIntrStatus & MCAN_INTR_SRC_BUS_OFF_STATUS) == MCAN_INTR_SRC_BUS_OFF_STATUS)
{
vtcan_BusOffConfirm();
SemaphoreP_post(&gMcan0TxDoneSem);
}
}
static void vtcan_mcanGPIOInit(void)
{
GPIO_setDirMode(CSL_MCU_GPIO0_BASE, VT_CAN_MCU_MCAN0_EN_PIN, GPIO_DIRECTION_OUTPUT);
GPIO_setDirMode(CSL_MCU_GPIO0_BASE, VT_CAN_MCU_MCAN0_STB_PIN, GPIO_DIRECTION_OUTPUT);
GPIO_setDirMode(CSL_MCU_GPIO0_BASE, VT_CAN_MCU_MCAN0_ERR_PIN, GPIO_DIRECTION_OUTPUT);
}
void vtcan_mcanTransceiver(uint8_t workmode)
{
if(workmode == MCAN_TRANSCEIVER_NORMALMODE)
{
GPIO_pinWriteHigh(CSL_MCU_GPIO0_BASE, VT_CAN_MCU_MCAN0_EN_PIN);
GPIO_pinWriteHigh(CSL_MCU_GPIO0_BASE, VT_CAN_MCU_MCAN0_STB_PIN);
GPIO_pinWriteLow(CSL_MCU_GPIO0_BASE, VT_CAN_MCU_MCAN0_ERR_PIN);
}else if(workmode == MCAN_TRANSCEIVER_STANDBYMODE)
{
GPIO_pinWriteLow(CSL_MCU_GPIO0_BASE, VT_CAN_MCU_MCAN0_STB_PIN);
}
}
int32_t vtcan_mcanRegisterInterrupt(void)
{
int32_t status = CSL_PASS;
HwiP_Params hwiPrms;
/* Register MCAN0 interrupt */
HwiP_Params_init(&hwiPrms);
hwiPrms.intNum = CONFIG_MCAN0_INTR;
hwiPrms.callback = &vtcan_mcan0IntrISR;
status = HwiP_construct(&gMcan0HwiObject, &hwiPrms);
if(status != SystemP_SUCCESS)
{
//DebugP_log("\nRegister MCAN0 interrupt FAILED...\n", -1);
}
gMcan0BaseAddr = (uint32_t) AddrTranslateP_getLocalAddr(CONFIG_MCAN0_BASE_ADDR);
return status;
}
void vtcan_mcan0FilterAllAtOnce(uint16_t *MsgID)
{
for(uint8_t i=0;i<MCAN0_TOTAL_RX_MSG;i++)
{
MCAN0_canSTDIDFilter[i].sfid2 = MCAN_STD_ID_MASK;
MCAN0_canSTDIDFilter[i].sfid1 = *(MsgID + i);
MCAN0_canSTDIDFilter[i].sfec = MCAN_STD_FILT_ELEM_FIFO0;//Store in Rx FIFO 0 if filter matches
MCAN0_canSTDIDFilter[i].sft = MCAN_STD_FILT_TYPE_CLASSIC;//Classic filter: SFID1 = filter, SFID2 = mask
/* Configure Standard ID filter element */
MCAN_addStdMsgIDFilter(gMcan0BaseAddr, i, &MCAN0_canSTDIDFilter[i]);
}
}
void vtcan_mcan0FilterOneByOne(uint8_t bank,uint16_t MsgID)
{
if(bank < MCAN0_TOTAL_RX_MSG)
{
MCAN0_canSTDIDFilter[bank].sfid2 = MCAN_STD_ID_MASK;
MCAN0_canSTDIDFilter[bank].sfid1 = MsgID;
MCAN0_canSTDIDFilter[bank].sfec = MCAN_STD_FILT_ELEM_FIFO0;//Store in Rx FIFO 0 if filter matches
MCAN0_canSTDIDFilter[bank].sft = MCAN_STD_FILT_TYPE_CLASSIC;//Classic filter: SFID1 = filter, SFID2 = mask
/* Configure Standard ID filter element */
MCAN_addStdMsgIDFilter(gMcan0BaseAddr, bank, &MCAN0_canSTDIDFilter[bank]);
}
}
static int32_t vtcan_mcanConfig(void)
{
uint32_t loopCnt;
int32_t configStatus = CSL_PASS;
st_mcanParams *MCAN0Params;
MCAN0Params = &sMCAN0Params[0];
/* Put MCAN in SW initialization mode */
MCAN_setOpMode(gMcan0BaseAddr, MCAN_OPERATION_MODE_SW_INIT);
while (MCAN_OPERATION_MODE_SW_INIT != MCAN_getOpMode(gMcan0BaseAddr))
{}
/* Initialize MCAN module */
configStatus += MCAN_init(gMcan0BaseAddr, MCAN0Params->mcanConfigParams.initParams);
if(configStatus != CSL_PASS)
{
//DebugP_log("\nMCAN Initialization FAILED...\n", -1);
}
/* Configure MCAN module */
configStatus += MCAN_config(gMcan0BaseAddr, MCAN0Params->mcanConfigParams.configParams);
if(configStatus != CSL_PASS)
{
//DebugP_log("\nMCAN Configuration FAILED...\n", -1);
}
/* Configure Bit timings */
configStatus += MCAN_setBitTime(gMcan0BaseAddr, MCAN0Params->mcanConfigParams.bitTimings);
if(configStatus != CSL_PASS)
{
//DebugP_log("\nMCAN Bit Time Configuration FAILED...\n", -1);
}
/* Configure Message RAM Sections */
configStatus += MCAN_calcMsgRamParamsStartAddr(MCAN0Params->mcanConfigParams.ramConfig);
if(configStatus != CSL_PASS)
{
//DebugP_log("\nMCAN Message RAM Addr Calculation FAILED...\n", -1);
}
configStatus += MCAN_msgRAMConfig(gMcan0BaseAddr, MCAN0Params->mcanConfigParams.ramConfig);
if(configStatus != CSL_PASS)
{
//DebugP_log("\nMCAN Message RAM Configuration FAILED...\n", -1);
}
//can receive id fifliter
uint16_t test_mcan0MsgID[] = {0x25F,0x24a,0x162,0x163,0x164,0x152,0x24c,0x262,0x265,0x74,0x112,0x114,0x25c,0x26c,0x82,0xB2,0x285,0x174,0x70,0x14C,0x88,0x90,0x93,0x96,0x98};
vtcan_mcan0FilterAllAtOnce(test_mcan0MsgID);
/* Take MCAN out of the SW initialization mode */
MCAN_setOpMode(gMcan0BaseAddr, MCAN_OPERATION_MODE_NORMAL);
while (MCAN_OPERATION_MODE_NORMAL != MCAN_getOpMode(gMcan0BaseAddr))
{}
/* Enable Interrupts */
MCAN_enableIntr(gMcan0BaseAddr, MCAN0Params->mcanConfigParams.intrEnable,(uint32_t)TRUE);
/* Select Interrupt Line */
MCAN_selectIntrLine(gMcan0BaseAddr,MCAN0Params->mcanConfigParams.intrLineSelectMask,MCAN0Params->mcanConfigParams.intrLine);
/* Enable Interrupt Line */
MCAN_enableIntrLine(gMcan0BaseAddr,MCAN0Params->mcanConfigParams.intrLine,(uint32_t)TRUE);
/* Enable interrupts for Tx Buffers */
for (loopCnt = 0U ;
loopCnt < MCAN0Params->mcanConfigParams.txMsgNum ;
loopCnt++)
{
/* Enable Transmission interrupt */
configStatus += MCAN_txBufTransIntrEnable(gMcan0BaseAddr,loopCnt,(uint32_t)TRUE);
if(configStatus != CSL_PASS)
{
//DebugP_log("\nMCAN Tx Buffer Interrupt Enable FAILED...\n", -1);
}
}
return configStatus;
}
static void vtcan_mcanConfigTxMsg(MCAN_TxBufElement *txMsg,stCANTypeMsgBaseInfo TxMsgInfo)
{
uint8_t i;
/* Initialize message to transmit */
MCAN_initTxBufElement(txMsg);
/* Standard message identifier 11 bit, stored into ID[28-18] */
txMsg->id = ((TxMsgInfo.ID & MCAN_STD_ID_MASK) << MCAN_STD_ID_SHIFT);
txMsg->dlc = TxMsgInfo.DLC; /* Payload size is 64 bytes */
#ifdef CAN0_MODULE_CANFD
txMsg->fdf = TRUE; /* CAN FD Frame Format */
#else
txMsg->fdf = FALSE; /* CAN FD Frame Format */
#endif
txMsg->xtd = FALSE; /* Extended id not configured */
for (i = 0U; i < TxMsgInfo.DLC; i++)
{
txMsg->data[i] = TxMsgInfo.u8Data[i];
}
}
int32_t vtcan_txmsg(stCANTypeMsgBaseInfo TxMsgInfo,uint8_t TxMsgBufNum)
{
int32_t status = CSL_PASS;
MCAN_TxBufElement txMsg;
/* Configure Tx Msg to transmit */
vtcan_mcanConfigTxMsg(&txMsg,TxMsgInfo);
/* Write message to Msg RAM */
MCAN_writeMsgRam(gMcan0BaseAddr, MCAN_MEM_TYPE_BUF, TxMsgBufNum, &txMsg);
/* Add request for transmission, This function will trigger transmission */
status = MCAN_txBufAddReq(gMcan0BaseAddr, TxMsgBufNum);
if (CSL_PASS != status)
{
DebugP_log("Error in Adding Mcan0 Transmission Request...\r\n");
}
return status;
}
void vtcan_BusOffConfirm(void)
{
MCANBusOffInfo.CAN0BusErr = TRUE;
}
uint8_t vtcan_GetBusOffStaus(void)
{
return MCANBusOffInfo.CAN0BusErr;
}
void vtcan_ClearBusOffStaus(void)
{
MCANBusOffInfo.CAN0BusErr = FALSE;
}
void vtcan_BusOffRecovery(void)
{
//Restart the CAN controller
MCAN_setOpMode(gMcan0BaseAddr, MCAN_OPERATION_MODE_NORMAL);
while (MCAN_OPERATION_MODE_NORMAL != MCAN_getOpMode(gMcan0BaseAddr))
{}
}
int32_t vtcan_init(void)
{
int32_t status = SystemP_SUCCESS;
/* Construct Tx/Rx Semaphore objects */
//DebugP_log("vtcan-mcu10 mcan start %s\r\n", __TIME__);
status = SemaphoreP_constructBinary(&gMcan0TxDoneSem, 0);
if(status != SystemP_SUCCESS)
{
//DebugP_log("\nConstruct McanTxDoneSem FAILED...\n", -1);
}
status = SemaphoreP_constructBinary(&gMcan0RxDoneSem, 0);
if(status != SystemP_SUCCESS)
{
//DebugP_log("\nConstruct McanRxDoneSem FAILED...\n", -1);
}
//can transceiver(TJA1043) init
vtcan_mcanGPIOInit();
vtcan_mcanTransceiver(MCAN_TRANSCEIVER_NORMALMODE);
status = vtcan_mcanRegisterInterrupt();
status = vtcan_mcanConfig();
return status;
}
vt_can.c
#ifndef __VT_CAN_H__
#define __VT_CAN_H__
#ifdef __cplusplus
extern "C" {
#endif
#include <stdint.h>
#include <string.h>
#include "FreeRTOS.h"
#include "task.h"
#include <drivers/mcan.h>
#include <kernel/dpl/DebugP.h>
#include <kernel/dpl/AddrTranslateP.h>
#include <kernel/dpl/SemaphoreP.h>
#include <drivers/mcan.h>
#include "ti_drivers_config.h"
#include "ti_drivers_open_close.h"
#include "ti_board_open_close.h"
/* ========================================================================== */
/* Macros & Typedefs */
/* ========================================================================== */
#define MCAN_TRANSCEIVER_STANDBYMODE 0
#define MCAN_TRANSCEIVER_NORMALMODE 1
#define MCAN0_TOTAL_TX_MSG 32
#define MCAN1_TOTAL_TX_MSG 1
#define MCAN0_TOTAL_RX_MSG 32
#define MCAN1_TOTAL_RX_MSG 1
//#define CAN0_MODULE_CANFD
//#define CAN1_MODULE_CANFD
#ifdef CAN0_MODULE_CANFD
#define CANType_CANMSG_LEN_MAX 64
#else
#define CANType_CANMSG_LEN_MAX 8
#endif
#define VTCAN_MCAN0_CH 0
#define VTCAN_MCAN1_CH 1
//TJA1043 pin
#define VT_CAN_MCU_MCAN0_EN_PIN (0x07)
#define VT_CAN_MCU_MCAN0_STB_PIN (0x04)
#define VT_CAN_MCU_MCAN0_ERR_PIN (0x01)
typedef struct{
uint16_t ID;
uint8_t DLC;
uint8_t u8Data[CANType_CANMSG_LEN_MAX];
}stCANTypeMsgBaseInfo;
typedef struct
{
MCAN_BitTimingParams *bitTimings;
/**< mcan module bit timing parameters. */
MCAN_InitParams *initParams;
/**< mcan module initialization parameters. */
MCAN_ConfigParams *configParams;
/**< mcan module configuration parameters. */
MCAN_MsgRAMConfigParams *ramConfig;
/**< mcan module MSG RAM configuration parameters. */
uint32_t txMsgNum;
/**< tx message number. */
uint32_t stdIdFiltNum;
/**< standard ID message filter number. */
uint32_t intrEnable;
/**< Interrupt Enable/Disable Mask. */
uint32_t intrLineSelectMask;
/**< Interrupt Line Select Mask. */
uint32_t intrLine;
/**< Interrupt Line Select. */
} st_mcanConfigParams_t;
typedef struct
{
st_mcanConfigParams_t mcanConfigParams;
/**< mcan configuration parameters Refer struct #st_mcanConfigParams_t. */
Bool printEnable;
/**< Enable/disable print statements, used for stress testing. */
} st_mcanParams;
SemaphoreP_Object gMcan0TxDoneSem;
SemaphoreP_Object gMcan0RxDoneSem;
int32_t vtcan_init(void);
int32_t vtcan_txmsg(stCANTypeMsgBaseInfo TxMsgInfo,uint8_t TxMsgBufNum);
stCANTypeMsgBaseInfo vtcan_mcan0ReadRxMSG(void);
void vtcan_BusOffRecovery(void);
void vtcan_mcanTransceiver(uint8_t workmode);
void vtcan_mcan0FilterAllAtOnce(uint16_t *MsgID);
void vtcan_mcan0FilterOneByOne(uint8_t bank, uint16_t MsgID);
#ifdef __cplusplus
}
#endif // _cplusplus
#endif // __VT_CAN_H__
vt_can.h
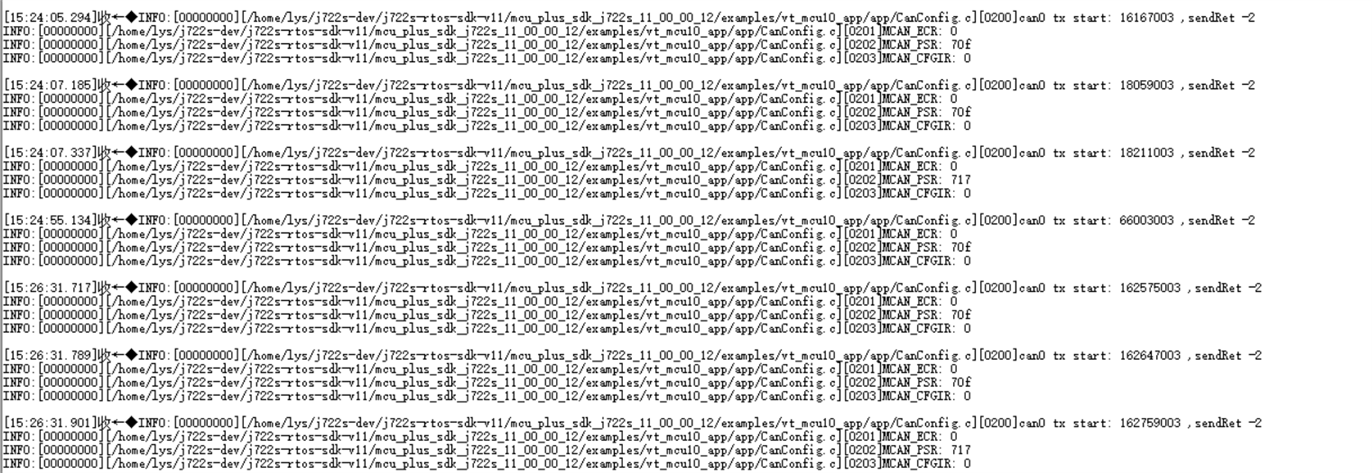
4.If you receive more than 3 messages sent consecutively by different CANIDs with different periods,the CAN transmission will lose frames. At the same time, the message ID to be received is also vt_can.c.(line 314)
![]()
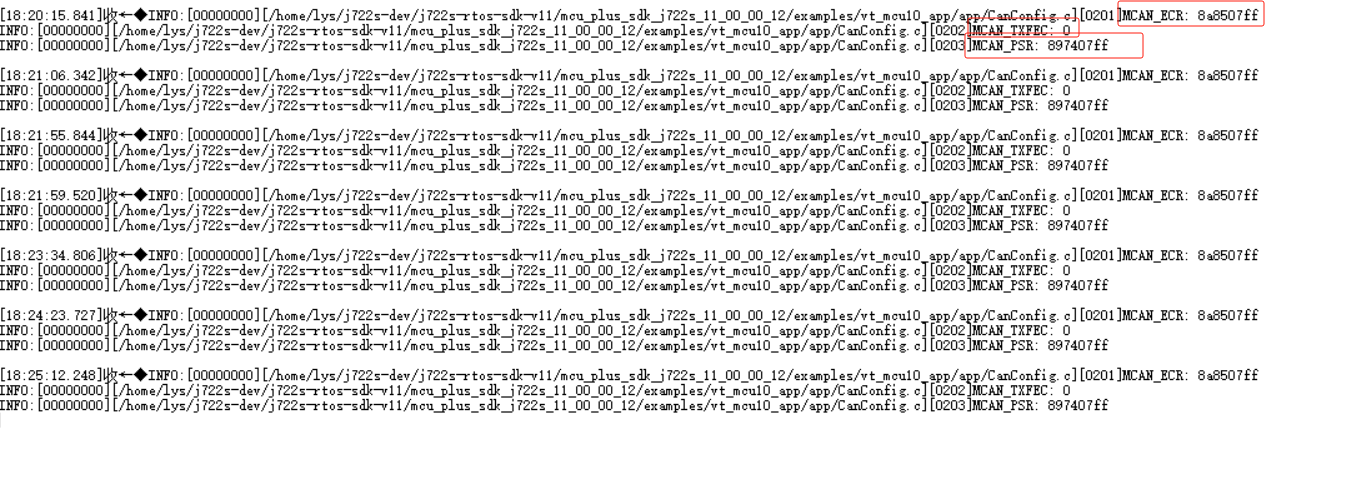
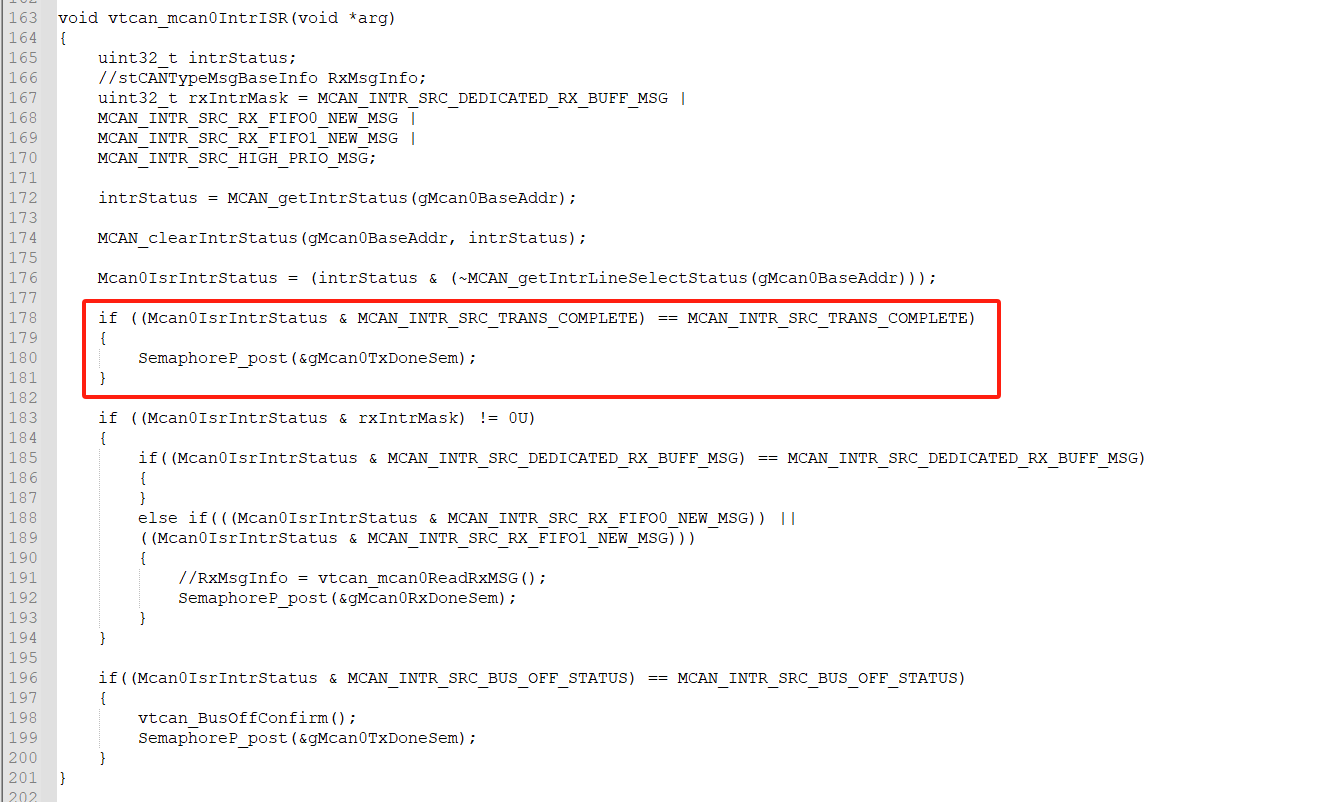
In addition, when the CAN transmission is found to be lost, the CAN transmission completion interrupt (the code in the red box in the figure below) is not entered. However, receiving messages is normal.
5. Please help confirm whether there are any errors in the CAN configuration parameters in the code, and point out any other errors.
Thanks