


Part Number: AM62A7
Other Parts Discussed in Thread: SYSCONFIG, SK-AM62A-LP
Hi experts,
Q:Is my understanding correct that the AM62A's main domain (A53) can control the peripherals of the MCU domain (R5F)?
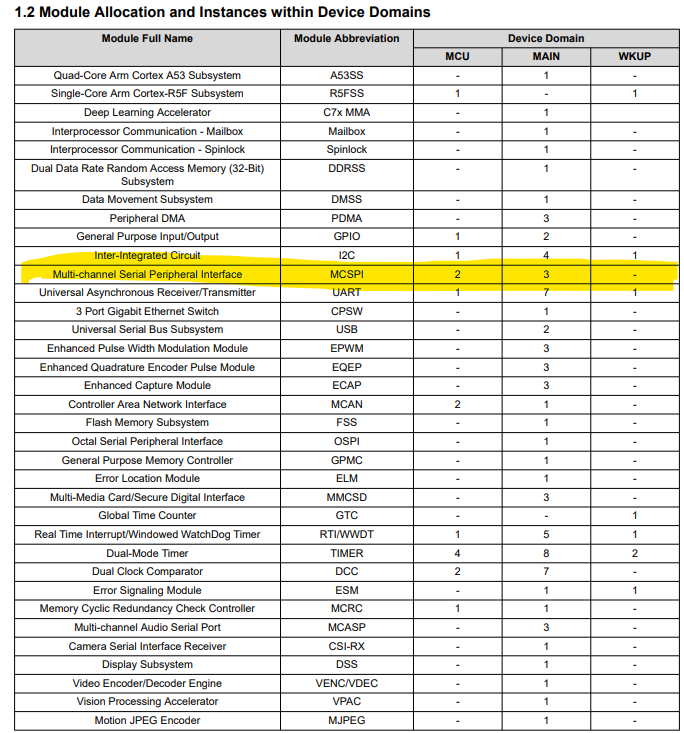
Specifically, is it correct to say that the main domain (A53) can control a total of 5 SPI interfaces, consisting of 3 main SPI and 2 MCU SPI?
My understand from the following URL that the MCU domain can control some peripherals of the main domain.
AM62Ax MCU+ SDK: Accessing main and wakeup domain peripherals from MCU domain
In MCU+SDK v11.1, I have confirmed that importing "mcspi_loopback_am62ax-sk_a53ss0-0_nortos_gcc-aarch64" and configuring it in SysConfig allows it to build.
Based on TRM section "3.3 Initiator/Target Connectivity," I understand they are internally connected.
Best regards,
O.H

